
Fターム[5J084CA61]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 2値化 (41)
Fターム[5J084CA61]に分類される特許
1 - 20 / 41
撮像装置、撮像方法、及びプログラム
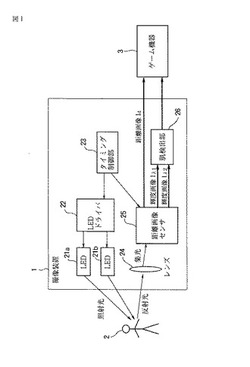
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム

【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム
【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
物体検出装置及びこれを備えた車載機器制御装置
【課題】互いに異なる波長帯の光を発する少なくとも2種類の検出対象物を検出する際に外乱光が存在しても、高精度な検出を可能とする。
【解決手段】撮像装置が撮像した画像データから、対向車両のヘッドランプと先行車両のテールランプがそれぞれ発する各検出波長帯(赤色と白色)についての分光情報を取得するとともに、同画像データから当該分光情報に対応した検出波長帯についての偏光情報を取得し、取得した分光情報によりヘッドランプとテールランプを識別し、偏光情報を用いてヘッドランプ及びテールランプからの直接光と雨路面からの照り返し光とを識別する。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から、判定期間中の入力信号に含まれるノイズの度数分布を幾何分布と仮定した分布を求め、求めた分布とランレングス測定部101の測定結果から得られるランレングスの分布とを比較することにより、入力信号が有効か否かを判定する判定手段(確率算出部103、ノイズ度数算出部104、有効性判定部105)とを備える。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して所定領域内の物体を特定する手段とを備える、車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、対応画像上の所定物体に対する所定領域の位置ずれ方向が常に同一方向である場合にレーダまたはカメラの光軸ずれがあると判断し、所定領域の位置ずれ方向が所定物体の移動方向と逆方向である場合にレーダとカメラの同期ずれがあると判断する判断手段と、を有する。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
振動振幅計測装置および振動振幅計測方法
【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7で計測された干渉波形の周期を、その直前と直後のうち少なくとも一方において計測された干渉波形の周期の移動平均値と比較することにより、干渉波形の周期を補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、周期の変化特性に応じて基準周期を補正する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
距離測定装置
【課題】遠方の対象物を検知可能とし、且つ、同時に近傍の対象物を高分解能で検出可能な距離測定装置を提供する。
【解決手段】第1点滅周期で点滅して第1波長帯の第1光波を他の物体に向けて発光する第1光波照射手段と、第2点滅周期で点滅して第2波長帯の第2光波を他の物体に向けて発光する第2光波照射手段とを、含む発光手段と、第1波長帯の光のみを透過させる第1濾光手段と、第2波長帯の光のみを透過させる第2濾光手段とを、含む分光透過手段と、物体で反射して第1濾光手段を透過した第1透過光を受光し当該第1透過光の受光量に応じた第1受光信号を出力する第1受光手段と、物体で反射して第2濾光手段を透過した第2透過光を受光し当該第2透過光の受光量に応じた第2受光信号を出力する第2受光手段とを、含む感光手段と、第1受光信号および第2受光信号に基づいて物体までの距離を算出する距離算出手段とを備える、距離測定装置である。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7の計測結果を基準周期と比較することにより補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物理量の誤算出の可能性を低減する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の数を数える信号抽出部7と、干渉波形の数から物体10との距離及び物体10の速度を算出する演算部8と、半導体レーザ1の発振波長変調の搬送波の振幅または周波数を調整することが可能な調整部11とを備える。
(もっと読む)
1 - 20 / 41
[ Back to top ]