
Fターム[5L096AA09]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 3次元画像 (415)
Fターム[5L096AA09]に分類される特許
401 - 415 / 415
物体の状態を推定する推定システム、推定方法および推定プログラム
3次元モデル記憶手段(170)は、対象物体の3次元形状データおよび照明基底データを予め記憶する。比較画像生成手段(110)は、3次元形状データおよび照明基底データにもとづいて、入力画像と同じ照明条件の下で、現時点での推定値の位置/姿勢に対象物体がある再現画像を比較画像として生成する。画像変位分布検出手段(120)は、比較画像を部分画像(小領域)に分割し、小領域ごとに比較画像と入力画像との画像変位分布を検出する。姿勢差分検出手段(130)は、画像変位分布および3次元形状データにもとづいて位置姿勢差分値を算出する。そして、終了判定手段(140)は、位置姿勢差分値が所定の閾値より小さいと判断した場合に、現在の位置姿勢推定値を最適位置姿勢推定値(13)として出力する。これにより、画像に含まれる物体の位置や姿勢を高速に推定できるようになる。 (もっと読む)
画像照合システム及び画像照合方法
物体の3次元データを入力する3次元データ入力手段(10)と、少なくとも1つの物体の参照画像を記憶する参照画像記憶部(30)と、物体の姿勢の候補である姿勢候補を生成する姿勢候補決定手段(20)と、姿勢候補に応じて3次元データを2次元の画像に射影しつつ参照画像に近い比較画像を生成する比較画像生成手段(40)と、参照画像と比較画像との距離値及び類似度のいずれか一方に基づいて照合を行う画像照合手段(55)とを備える。これにより、物体の参照画像が姿勢や照明等異なる条件で撮影されている場合にも、高精度に照合や検索ができる。また、物体の3次元物体モデルが予め得られなかったり、参照画像が1枚乃至少数しか存在しない場合にも、高精度に照合や検索ができる。  (もっと読む)
(もっと読む)
画像認識

カメラAが、Nのところで再方向付け、再位置決めされた3次元自然画像Bを生成する。異なったプロセスC、D、Eが、画像から異なった特徴を抽出し、異なった処理画像を与える。F、G、Hのところで、処理画像の占有するデータスペースを、たとえば、主成分分析法によって縮小させる。そして、縮小した処理画像をOのところで組み合わせ、画像Bを代表する画像キーを得る。Jのところで、画像キーIを、既知の画像の記憶させた画像キーLと比較し、比較出力をKのところでソートして潜在的一致の最終リストMを生成する。検証プロセスにおいて、たった1つの単一画像キーLを比較することができる。あるいは、C、D、Eのところで、処理画像を組み合わせてから単一サブスペース縮小法および/または最適化法を実施することができる。2次元データを3次元データと組み合わせたり、3次元データの代わりに使用したりしてもよい。 (もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 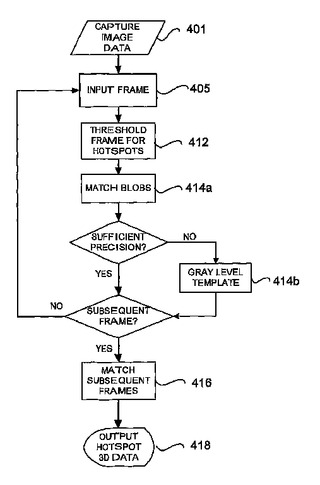 (もっと読む)
(もっと読む)
重み情報を用いた物体姿勢推定・照合システム
姿勢や照明の異なる条件で撮影された様々な物体の画像に対して、適切な重み係数設定により高精度な姿勢推定および照合を行う物体姿勢推定・照合システムが開示される。姿勢候補決定部は、姿勢候補を決定する。比較画像生成部は、参照3次元物体モデルを基に、入力画像に近い比較画像を姿勢候補に応じて生成する。重み係数変換部は、標準3次元基準点と参照3次元基準点を用い、標準3次元重み係数と参照3次元物体モデルとの座標の対応を求め、姿勢候補に応じて標準3次元重み係数を2次元重み係数に変換する。加重照合・姿勢選択部は、2次元重み係数を用い、入力画像と比較画像との重み付き距離または類似度を計算し、当該物体に対して最も距離値の小さい比較画像(姿勢候補)を選択することにより、物体の姿勢推定および照合を行う。 (もっと読む)
構造テンソルを利用して肺小結節及び大腸ポリープを検知する方法及びシステム
ディジタル画像中の球形対象を識別する方法を提案する。画像は複数の3D空間点を含む。この方法は画像ドメイン内の各点において画像の勾配を計算し(100);画像ドメイン内の各点において基本構造テンソルを計算し(102);画像ドメイン内の各点の構造テンソルを求め(103);構造テンソルの固有値を求め(104);各構造テンソルについて、前記構造テンソルの最小固有値と前記構造テンソルの最大固有値の比で表される等方性値を計算し(105)、球形対象であることを示す等方性度=1を見出すステップから成る。  (もっと読む)
(もっと読む)
画像中のコンパクト・オブジェクトを検出するシステム及び方法
3次元画像のうち、医療画像となり得る画像特徴を認識するための画像処理システムは、3次元画像からキャンディデート画像を探査するキャンディデート・サーチャー(80)によって使用されるマスクを生成するマスク・ジェネレータ(78)を利用する。キャンディデータ・サーチャー(80)は画像の前景領域の一部にマスクを重ね、マスクと前景領域の前記部分との間の交点数をカウントすることによって構造/オブジェクトの存在を断定する。  (もっと読む)
(もっと読む)
局所的曲率分布パターンの分析方法
複数の3Dボリューム・ポイントを含むディジタル画像中の病変部位及びポリープを検出する方法を提供する。この方法は、画像中の曲面を識別し(101)、曲面中のそれぞれのポイントに関して、第1曲率測度を計算し(102)、曲面中のそれぞれのポイントに関して、それぞれのポイントが1組のリングの中心点となり、それぞれのリングがこのリングの中心点から測地学的に等距離であるようにそれぞれのポイントを中心に1組のリングを形成し(103)、それぞれのリングに関して、第1曲率測度の標準偏差を計算し(104)、第1曲率測度の標準偏差が最小のリングを選択する(105)ステップを含む。選択されたリングに関して、第1曲率勾配を計算し(107)、曲率勾配がポリープまたは病変部位として予測されるパターンから逸脱しているポイントを曲面から消去する(108)。 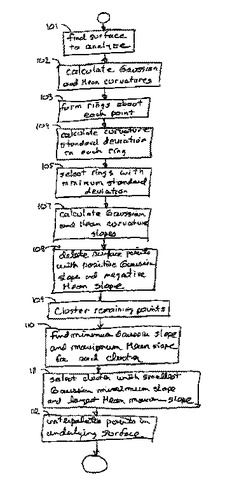 (もっと読む)
(もっと読む)
目標物の自動識別システム

第二輪郭(CM)と第一輪郭(CI)との近接性の測定方法は、第一輪郭の各点に関して、最も近いと決定された第二輪郭点と関連付けるステップ、及び前記第二輪郭点と関連付けられた第一輪郭点(I24、I28、I29)の集合の中から最も近い第一輪郭点(I24)を決定することにより、第二輪郭の各点(M15)と第一輪郭の一つ又はゼロの点との組合せステップを含む。
目標物の自動識別方法はこの近接性の測定プロセスを、第二輪郭として適用されるテンプレート輪郭の近接性の尺度を決定するために、第一輪郭として適用される画像輪郭に適用する。
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 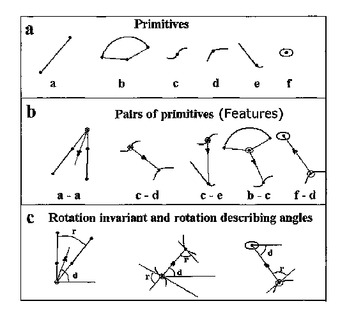 (もっと読む)
(もっと読む)
画像対象処理
少なくとも1つの画像の少なくとも1つの対象に関連する複数の像点(105、107、109、111)を検出する単なる検出器(201)を有する装置(200)。前記検出器は異なる種類の像点を区別しない。前記検出器(201)は、複数の像点(105、107、109、111)を対象点(105、107)の群と、接点(111)の群と、誤って検出された点(109)の群とに群分けする、群分け処理装置(203)と結合される。前記装置は、処理装置配列209を有し、前記対象点(105、107)の群及び前記接点(111)の群の前記像点を個別に処理する。前記対象点処理は動的特徴に基づく奥行き情報を生成し、前記接点処理は静的特徴に基づく奥行き情報を生成する。従って改善された奥行き情報が得られ、単純化された検出器が利用できる。  (もっと読む)
(もっと読む)
画像処理装置および画像処理方法、並びにコンピュータ・プログラム
【課題】 複数視点位置からの画像データに基づいて高画質な三次元画像生成を可能とする装置および方法を提供する。
【解決手段】 パッチ面毎に、パッチ面と各視点間の距離データ、および各視点のパッチ面に対する方向データとを適用した画質評価値に基づいてテクスチャ画像の選択を実行し、パッチ境界部におけるテクスチャ画像間の画素値誤差データに基づいて、端点移動によるマッチング処理を実行し、隣接テクスチャ画像中、パッチ面に対して、正対した視点方向にあるテクスチャ画像の画素値に大きな重み付けを行ない、パッチ境界部における画素値を算出し、さらに、パッチ面内の画素値を、パッチ境界線からの距離に反比例した重み係数を適用して、パッチ境界線の画素値に基づいて算出する。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】 任意の図形を分割後の面積ができる限り均一に分割する。
【解決手段】 ステップS11で、分割する対象領域と、その分割数Nが指定される。ステップS12で、対象領域を占める総画素数Totalが取得される。ステップS13で、パラメータkが1に初期化され、ステップS14で、第k番目の分割領域Skの理想値St[k]が算出される。ステップS15で、理想値St[k]に基づいて第k番目のセクションSkの画素数の決定値Sd[k]が決定される。
(もっと読む)
保険料率算出方法、保険料率算出装置、及び記録媒体
【課題】 損害保険及び生命保険等の各種保険の保険料率を下げることが可能な保険料率算出方法、保険料率算出装置、及び記録媒体を提供する。
【解決手段】 自動車内、屋内、及び市中等の各所にCCDカメラ等の撮影手段を設置し、保険対象となる被保険者200を撮影して、その映像を記録することを保険契約の条件として、契約時の保険料率を算出する。
(もっと読む)
3次元形状データの統合処理方法および3次元形状データの表現方法
【課題】 統合すべき部分形状のポテンシャル方向が大きく異なる場合でも、正確な統合が可能な統合処理方法を提供する。
【解決手段】 部分形状データ10および20は位置合わせを行った段階では異なる曲面を構成しているので、それぞれの形状ベクトルV1およびV2は独立しているが、部分形状データ10および20を形状ベクトルを用いて表現し、形状ベクトルの演算により部分形状データ10および20を統合することで統合後の形状ベクトルV3を得る。
(もっと読む)
401 - 415 / 415
[ Back to top ]