
Fターム[5L096BA05]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | ロボット (159)
Fターム[5L096BA05]に分類される特許
1 - 20 / 159
情報処理装置、情報処理方法、及び、プログラム
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム

【課題】様々な位置姿勢や形状のワークの輪郭線を、精度良く抽出可能な画像処理装置及び画像処理方法並びに画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像取得部31と、元画像を2値化して元画像からワークの概略領域を特定する領域特定部32と、概略領域を膨張処理する領域膨張処理部34と、膨張処理された概略領域の境界線上に、複数の基準点を設定する基準点設定部35と、元画像から複数のエッジを抽出するエッジ抽出部33と、抽出された複数のエッジと基準点設定部35により設定された複数の基準点とを合成し、複数のエッジの中から複数の基準点のそれぞれに対して予め定められた位置にあるエッジを選択する輪郭エッジ選択部36と、選択された複数のエッジから連続したワークの輪郭線を抽出する輪郭線抽出部37と、を備えた画像処理装置。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
フラットパネル表示基板製造装置、および、フラットパネル表示基板製造装置の画像処理方法
【課題】フラットパネル表示基板製造でアライメントマークを検索するときに、アライメントマークのマスク領域を自動生成し、高精度にアライメントマークを検索できるようにする。
【解決手段】表示パネルとTABの各々に位置合わせをおこなうためのアライメントマークにより、アライメントマークを認識するときに、撮像画像よりアライメントマーク教示画像を切り出し、そのアライメントマークを認識して、アライメントマークのエッジ点を抽出する。そして、エッジ点に囲まれたエッジ範囲を算出し、アライメントマーク教示画像のエッジ範囲に含まれない領域を、マスク領域として算出し、算出されたマスク領域により、アライメントマーク教示マスク画像を生成し、アライメントマーク教示マスク画像によりマスクしたアライメントマークを認識する。
(もっと読む)
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム
【課題】 直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】 直線検出装置30は、撮像手段20で撮像された撮影画像22内のエッジ点23について、撮影画像に基づく球面画像40内の各エッジ点の対応点である対応エッジ点の球面勾配ベクトルを算出する勾配算出部34と、球面画像における直線投影面60の法線ベクトルnを表す極角θ及び方位角φで構成されるハフ空間70に、各対応エッジ点を含む直線投影面の法線ベクトルを投票する投票部35と、所定の閾値以上の投票数を有する法線ベクトルで規定される直線投影面を決定することで、撮影画像内の直線を特定する直線特定部36とを備える。投票部は、各対応委エッジ点の位置ベクトルと直交する法線ベクトルであって、法線ベクトルと対応エッジ点における球面勾配ベクトルとの内積が0より大きい法線ベクトルを投票する。
(もっと読む)
マーカ、マーカ検出方法および装置
【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】検出対象エッジに対して類似形状の非検出対象エッジを持つような状況下で照明の変化が起こった場合でも、検出対象エッジのみを安定して検出することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】サンプリング領域毎の平均輝度値に基づいて特徴量を設定し、エッジ選択のための閾値を特徴量ヒストグラムから求め、求めた閾値と、予め記憶しておいた検出対象エッジ、非検出対象エッジの特徴量との相対関係に基づき、検出対象エッジのみを選択する。このように、検出対象ワークの入力画像に対し、毎回エッジ特徴量を計算して、検出対象エッジと非検出対象エッジを分離するための特徴量の閾値を動的に算出できるので、照明装置の劣化等が原因で入力画像内の輝度変動が大きくなった場合でも、安定して検出対象エッジと非検出対象エッジとを分離し、的確に検出することができる。
(もっと読む)
芝刈り状況監視機能を有する自動芝刈り機
【課題】走行中の芝刈り状況を監視することが可能な芝刈り状況監視機能を有する自動芝刈り機を提供する。
【解決手段】少なくとも位置検出手段を含む各種センサを有する自律走行型の自動芝刈り機であって、走行車両の駆動系(アクセル)、制動系(ブレーキ)、及び操舵系(ステアリング)のうちの少なくとも一つを自動操作するためのアクチュエータと、アクチュエータにより走行車両を目標地点に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、芝刈り状況を判断するための画像処理ユニットと、センサの情報を基に各ユニットを制御するための各種演算及び演算に対応する処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
情報処理装置、情報処理方法、及び、プログラム
【課題】エージェントがアクションを行う環境中の物体の学習を、容易に行う。
【解決手段】分離学習モデルは、画像の背景のモデルである背景モデルと、背景上を移動可能な、画像の前景のモデルである1以上の前景モデルとを有する。背景モデルは、背景の見えを表す背景見えモデルを有する。1以上の前景モデルのうちの少なくとも1つは、前景に対応する物体が行うアクションによって、背景上の前景の位置に対応する状態が遷移する、アクションごとの遷移確率と、前景の見えを表す前景見えモデルとを有する。以上のような分離学習モデルの学習が、物体が行うアクションと画像の観測値とを学習データとして用いて行われる。本技術は、例えば、物体を操作するエージェントの学習を行う場合等に適用できる。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】ユーザの操作によって、作業空間における指示対象物に投影されたパターンを取得する画像取得部51と、該画像取得部51により取得された前記パターンから前記指示対象物の位置情報である座標を抽出する位置情報抽出部124とを備え、特定された前記指示対象物の位置情報に基づいた前記指示対象物に対する動作指示に基づいて、前記指示対象物に対する動作を実行する、前記作業空間を自律的に移動する自走式ロボットに用いられる位置特定装置101を採用する。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
ロボット装置
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
ロボット、位置推定方法及びプログラム
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】回転可能なカメラの撮像画像から観測対象の人物の領域を検出し、検出された人物の領域に対して、カメラの回転角度を含む観測状況に基づいて複数の推定粒度の情報を有するパーティクルの推定粒度を変更し、各推定粒度を用いて観測対象の位置を推定するように構成する。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
ピッキングシステムおよびピッキング方法
【課題】乱雑に配置された複数の薬品等のピッキング対象物体の中から各ピッキング対象物体を認識してピッキングすることが可能なピッキングシステムおよびピッキング方法の提供。
【解決手段】複数のピッキング対象物体を含む画像を入力する画像入力手段10と、複数のピッキング対象物体について予め各ピッキング対象物体の種類ごとにテンプレート画像を記憶またはテンプレート画像の面積を記憶するテンプレート記憶手段16と、画像入力手段10により入力された画像からピッキング対象物体領域を抽出する対象物体領域抽出手段12と、各ピッキング対象物体領域に外接する矩形の面積とその各ピッキング対象物体領域の面積との差の第1項と、各ピッキング対象物体のテンプレート画像の面積と各ピッキング対象物体領域の面積との差の第2項とを含む評価関数により各ピッキング対象物体を識別する識別手段15とを含む。
(もっと読む)
情報処理装置、情報処理システム及び情報処理方法
【課題】距離画像のノイズに影響を受けにくく、かつ高精度なモデルフィッティングを行うことを目的とする。
【解決手段】物体の幾何的特徴を表す3次元モデルのデータを保存する3次元モデル保存部210と、物体を撮像した2次元画像を入力する2次元画像入力部220と、物体を撮像した距離画像を入力する距離画像入力部230と、2次元画像入力部220から入力された2次元画像から画像特徴を検出する画像特徴検出部250と、距離画像入力部230から入力された距離画像から画像特徴に対応する3次元座標を算出する画像特徴3次元情報算出部260と、画像特徴の3次元座標と3次元モデルとを照合するモデル照合部270とを備える。
(もっと読む)
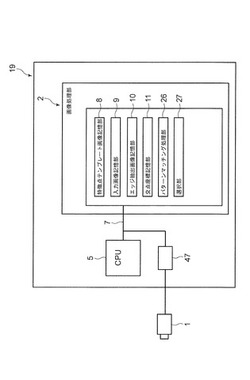
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
1 - 20 / 159
[ Back to top ]