
Fターム[5L096FA18]の内容
Fターム[5L096FA18]に分類される特許
1 - 20 / 175
画像処理装置、及びプログラム
外界認識方法,装置,および車両システム
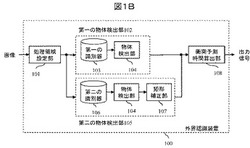
【課題】物体までの距離によらず好適に,車両等の物体検出を行う。
【解決手段】自車周辺を撮影した画像を解析する外界認識装置100は,近傍を表す画像の第一領域,および遠方を表す画像の第二領域を設定する処理領域設定部101と,設定された第一領域において第一の識別器103により物体検出を行う第一の物体検出部104と,設定された第二領域において第二の識別器106により背景パターンをも考慮して物体検出を行う第二の物体検出部104と,検出された物体矩形を補正する矩形補正部107と,検出された物体矩形に基づき衝突までの予測時間を算出する衝突予測時間算出部108を備える。
(もっと読む)
画像処理装置、画像処理方法、画像形成装置、画像処理プログラム

【課題】帳票画像を読み取って罫線を認識する画像処理において、様々な形状を持つ罫線の角部を認識することができる。
【解決手段】幅と長さを有する罫線と、二つの罫線の角部領域に形成される角部罫線領域を有する画像を読み取る画像処理装置において、前記画像から、前記角部罫線領域を抽出する角部罫線領域抽出手段と、前記角部罫線領域の画像から、前記角部罫線領域の画像の特徴量を抽出する特徴量抽出手段と、前記角部罫線領域の複数の角部のパターンに対応した特徴量を保持する特徴量辞書と、前記特徴量抽出手段により抽出された特徴量と、前記特徴量辞書に保持されている前記角部のパターンの特徴量とを比較して一致度を算出し、所定の一致度を有する前記角部のパターンを前記角部罫線として抽出する角部罫線抽出手段と、を有する。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
物体識別システム及びプログラム
【課題】物体表面に形成される画像に基づくランダム性を利用して識別対象の物体のパターンと照合すべきパターンの数を絞り込む。
【解決手段】それぞれ表面に固有のパターンを有し、表面に画像が形成された複数の物体ごとの撮像画像を取得し、複数の物体ごとに、当該物体について取得された撮像画像における、当該物体に形成された画像に基づく特徴に応じて、当該物体を複数の分類のいずれかに分類し、複数の物体ごとに、当該物体の識別情報と、当該物体の表面が有するパターンを示すパターン画像と、当該物体の分類とを関連付けて登録し、複数の物体のうちの1つの対象物体を撮像した対象物体撮像画像に基づいて、当該対象物体の分類の候補を取得し、取得された分類に関連付けて登録されたパターン画像を取得し、取得されたパターン画像のうち、対象物体撮像画像と照合したパターン画像に関連付けられた識別情報を、対象物体の識別情報として特定する。
(もっと読む)
画像特徴量抽出装置及びこれを用いた画像処理によるマーカ検出装置
【課題】画像中から閉曲線を抽出し、さらに閉出線に囲まれた内側部分の画像の輝度情報を抽出して整理し、画像特徴量を構成することにある。
【解決手段】画像中から閉曲線を抽出する閉曲線抽出部14と、閉曲線抽出部14により抽出された閉曲線に外接する最小矩形を計算する最小矩形抽出部15と、最小矩形抽出部15により計算された最小矩形から画像特徴量全体の回転方向を決定する回転方向決定部16と、閉曲線抽出部14により抽出された閉曲線に囲まれた内側部分の画像の輝度情報を抽出する輝度情報抽出部17と、閉曲線抽出部14、最小矩形抽出部15、回転方向決定部16及び輝度情報抽出部17により求められた閉曲線・回転方向・輝度情報を整理して画像特徴量を構成する画像特徴量構成部18と、を備えるので、対象物のサイズ変化・回転に影響を受け難い画像特徴量を抽出することができる。
(もっと読む)
奥行き画像内の物体を検出する方法およびシステム
【課題】画像内の物体を検出するスキャンウィンドウ手法であって、計算効率が良い方法で、奥行き画像内の物体を検出する方法を提供する。
【解決手段】奥行き画像内の物体を検出する方法が、奥行き画像内の領域を覆う検出ウィンドウを決定することを含み、該検出ウィンドウのロケーションは、奥行き画像内の候補ピクセルのロケーションに基づき、検出ウィンドウのサイズは、候補ピクセルの奥行き値および物体のサイズに基づいている。検出ウィンドウ内の前景領域が、候補ピクセルの奥行き値および物体のサイズに基づいてセグメント化される。特徴ベクトルが、前景領域内のピクセルの奥行き値に基づいて求められ、特徴ベクトルが分類されて、物体が検出される。
(もっと読む)
物体認識装置および物体認識方法
【課題】識別対象が画像上で変形する場合であっても、その識別対象の認識率を向上させることができる、物体認識装置および物体認識方法を提供する。
【解決手段】物体認識装置1は、記憶部20内に、認識対象の情報を示す監視物体情報210と、カメラ装置のパラメータを示すカメラ情報220を記憶している。そして、物体認識装置1は、監視物体情報210を用いて、監視空間上に検知領域を作成し、その作成した検知領域を、カメラ情報220を用いて、監視画像上の変形検知領域に変換する。物体認識装置1は、変形検知領域の画像情報100について特徴量を抽出し、認識対象の物体か否かを判定する。
(もっと読む)
電子機器及び抽出方法
【課題】動画像から、ある動きをする物、人、動物などを簡便に抽出する。
【解決手段】電子機器1は、オブジェクトの動きを表現するリズム情報の類似度に基づいて動画像からオブジェクトを抽出する電子機器であって、オブジェクトの抽出に用いる抽出用リズム情報を取得する抽出用リズム情報取得部40と、抽出用リズム情報取得部40によって取得された抽出用リズム情報と、動画像内のオブジェクトのリズム情報との類似度を算出する算出部60と、算出部60によって算出された抽出用リズム情報との類似度が所定の閾値以上であるリズム情報として当該動きが表現されているオブジェクトを動画像から抽出する抽出部70とを備える。
(もっと読む)
プログラム、情報記憶媒体、端末、サーバ、及びマーカー表示体
【課題】処理負荷を軽減し、マーカーをより正確に検出することが可能なプログラム、情報記憶媒体、端末及びマーカー表示体を提供すること。
【解決手段】第1の色条件を満たす複数の画素によって形成される第1の色領域に外接する第1の矩形領域と、第2の色条件を満たす複数の画素によって形成される第2の色領域に外接する第2の矩形領域とを、撮像画像から抽出し、第1の矩形領域、第2の矩形領域のうちいずれか一方が他方を内包する位置関係である場合にマーカーがあると判定する。
(もっと読む)
画像処理装置、画像符号化システム及び画像復号システム
【課題】ユーザの指定なしに、画像データの特徴部分を表す画像データを生成する。
【解決手段】画像処理装置10は、特徴量検出部14と、最適領域生成部162と、出力データ生成部18と、を備える。特徴量検出部14と、入力画像データの特徴部分を検出し、検出した特徴部分を含む特徴領域の位置を示す特徴領域情報を生成する。最適領域生成部162は、特徴領域情報に基づいて、前記特徴領域のサイズに応じた最適領域の位置を示す最適領域情報を生成する。出力データ生成部18は、最適領域情報に基づいて、入力画像データのうち最適領域の画素を抽出し、抽出した画素に基づいて出力画像データを生成する。
(もっと読む)
顔検出方法および顔検出装置、ならびに、プログラム
【課題】顔検出の検出結果に基づき対象人物が口を覆う用具を装着しているか否かを判定可能とする。
【解決手段】画像から顔を検出し、検出された顔から口の特徴点を抽出して口の縦幅および横幅を求め、口の縦幅および横幅と、口について予め求められた標準の縦幅および横幅との第1の差分および第2の差分をそれぞれ算出し、第1および第2の差分の絶対値を取った値に対して閾値判定を行う。第1の差分が第1の閾値Th1未満であり、且つ、第2の差分が第2の閾値Th2未満である場合に、口が覆われていないと判定する。また、第1の差分が第1の閾値Th1である場合において、第2の差分が第2の閾値Th2以下で、且つ、第3の閾値Th3を超える場合には、口を開けた状態が検出されたものと見做し、口が覆われていないと判定する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】 撮影画像中の表示枠を切り出した切出し画像を生成する画像処理装置において、切出し画像を観察しているユーザに与える、表示枠の変動によるストレスを軽減できる画像処理装置を提供する。
【解決手段】 画像処理装置100は、撮影により画像を生成する画像生成部101と、画像中の移動体を囲む領域を検出枠として検出する人物検出部102と、検出枠の位置の履歴に基づいて、位置が振れないように、検出枠に対応する表示枠を決定する表示枠中心位置決定部107と、表示枠中心位置決定部107にて決定された表示枠の切出し画像を生成する切出し画像生成部110とを備えている。
(もっと読む)
情報端末装置
【課題】特別なセンサ等を用いることなく、撮像部に対する被写体の空間的な動作によって表示部の情報を制御できる情報端末装置を提供する。
【解決手段】撮影画像より色特徴に基づいて被写体領域を抽出する領域形成部21、被写体領域を包含する第一の外接多角形を形成する第一多角形形成部221、第一の外接多角形の内部より被写体領域を排除した内部背景領域を抽出する内部背景抽出部222、内部背景領域を包含する第二の外接多角形を形成する第二多角形形成部223、第一の外接多角形、内部背景領域及び第二の外接多角形に基づいて、被写体の撮影部1に対する位置及び姿勢を推定する姿勢推定部23及び、推定された位置及び姿勢に基づいて表示部3を制御する制御部4を備えて情報端末装置10を提供する。
(もっと読む)
画像2値化方法および画像2値化装置
【課題】2値化対象画像の背景に絵柄が含まれ、背景の絵柄が認識対象の文字に重なっている場合に、画像2値化装置が、より適切な2値化画像を生成し得るようにする。
【解決手段】画像2値化装置1が、2値化対象画像から局所領域を切り出す局所領域画像切出部124と、切り出された局所領域の画素値に基づいて2値化処理の閾値を設定する局所領域閾値設定部125と、設定された閾値に基づいて2値化処理を行う局所2値化処理部126とを具備する。これにより、文字領域と絵柄領域とが連結している場合に、文字領域と絵柄領域との輝度差に基づいて、文字領域と絵柄領域とが連結しない2値化画像を生成し得る。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
映像処理装置および方法
【課題】 監視カメラの映像では被写体の顔や人体としての特徴が検出しやすい方向に映るとは限らず、適切な追尾結果が得られるとは限らない。
【解決手段】 映像処理装置100は、映像から物体を検出する物体検出部102と、検出した物体を追尾する物体追尾部103と、軌跡管理部106と、映像から人体を検出する人体検出部104と、物体対応付部105とを有する。軌跡管理部106は、追尾した物体の軌跡を管理する。物体対応付部105は、物体検出部102により検出した物体と人体検出部104により検出した人体とを対応付け、軌跡管理部106は、追尾した物体が物体対応付部105により人体に対応付けられたことを管理する。
(もっと読む)
侵入物体検出装置
【課題】監視領域内に存在する植栽の前を移動する侵入物体を検出するとともに、植栽の揺れによる誤検出を抑制できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置100は、監視領域を撮影した監視画像を取得する撮像部10と、監視領域に侵入物体が存在しない状況において監視領域を撮影した画像である背景画像と、植栽が撮像されている画像上の領域を示す植栽領域を記憶する記憶部20と、監視画像と背景画像の差分によって、輝度値が変化した変化領域を抽出する変化領域抽出手段31と、変化領域について、変化領域が植栽領域と重なっている場合に重なっていない場合より侵入物体らしさが低くなる侵入物体らしさの度合いを表す侵入物体属性値を算出し、侵入物体属性値に基づいて変化領域が侵入物体によるものか否かを判定する判定手段36を有する。
(もっと読む)
物体認識装置及びプログラム
【課題】位置ずれや画像のぼけが生じている場合でも、精度良く対象物の種類を識別する。
【解決手段】標識検出部22で、撮像画像から認識対象物である標識の形状を利用した手法により標識を検出し、候補領域設定部24で、検出された標識を含み、撮像画像上での位置が異なる複数の候補領域を設定する。評価画像生成部26により、設定された候補領域内の画像を撮像画像から切り出して評価画像を生成し、類似度算出部30で、標識を識別するために標識の種類毎に予め学習処理により生成された識別モデルと評価画像の各々との類似度を算出し、標識種類識別部32で、評価画像の撮像画像上での位置に応じた類似度の変化を正規分布に当てはめて算出される評価値が最も高い識別モデルの種類を、検出された標識の種類として識別する。
(もっと読む)
1 - 20 / 175
[ Back to top ]