
Fターム[5L096FA66]の内容
Fターム[5L096FA66]に分類される特許
161 - 180 / 1,043
目標追跡装置、目標追跡方法
【課題】目標追跡装置において、追跡目標が遮蔽物に遮蔽された後、さらに遮蔽物が重なった場合における追跡目標の追跡精度を高める。
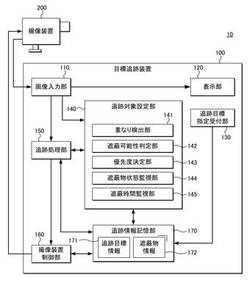
【解決手段】追跡目標指定受付部と、追跡対象設定部と、入力画像内において、追跡対象設定部によって設定された追跡対象を追跡する追跡処理部とを備え、追跡対象設定部は、追跡目標を認識した場合は、追跡目標を追跡対象として設定し、追跡目標が遮蔽物に遮蔽された場合は、遮蔽物を追跡対象として設定し、追跡対象として設定されている遮蔽物が、他の遮蔽物と少なくとも一部が重なった場合は、それぞれの遮蔽物の動きベクトルと追跡目標の動きベクトルとの差に基づいて算出される各遮蔽物が追跡目標を遮蔽する推定遮蔽時間に基づき、その遮蔽物の重なり時点における残り時間が長い方の遮蔽物を追跡対象として設定する。
(もっと読む)
目標追跡装置、目標追跡方法

【課題】目標追跡装置において、追跡目標が遮蔽物に遮蔽され、遮蔽物が追跡対象となっている場合における追跡目標の検出精度を高める。
【解決手段】追跡目標指定受付部と、追跡対象設定部と、撮像装置から連続して入力される入力画像内において、追跡対象設定部によって設定された追跡対象を、サイズ情報を含む検出情報を基準に検出して追跡する追跡処理部とを備え、追跡対象設定部は、入力画像内において追跡目標を認識した場合は、追跡目標を追跡対象として設定し、入力画像内において追跡目標が遮蔽物に遮蔽された場合は、遮蔽物を追跡対象として設定するとともに、遮蔽物と追跡目標とのサイズ比を取得し、追跡対象となっている遮蔽物の入力画像内でのサイズ変動と取得したサイズ比とに基づいて追跡目標の検出情報に含まれるサイズ情報を更新して、追跡目標の再出現を検出する。
(もっと読む)
ジェスチャ認識装置
【課題】ユーザにとって振る舞いやすい直感的で自然なジェスチャを、ウェアラブル機器の動作制御のためのジェスチャに採用しつつ、ウェアラブル機器の誤動作を抑えることが可能なジェスチャ認識装置を提供することを目的とする。
【解決手段】ユーザに直接取り付けられる又はユーザに装着された情報機器4に取り付けられる撮像部2と、撮像部2により撮像されるユーザの手指の映像を用いて、少なくともユーザが親指と人差し指とで環をつくるジェスチャを含む、予め定義されているユーザの手指のジェスチャを認識し、その認識したジェスチャに対応する制御コマンドを情報機器4に出力するジェスチャ認識部3とを備えてジェスチャ認識装置1を構成する。
(もっと読む)
物体追尾装置、物体追尾方法およびそのプログラム
【課題】時系列に入力される撮影画像の中から特定の物体が映された領域を、より高速かつ高精度に追尾できる物体追尾装置、物体追尾方法およびそのプログラムを提供する。
【解決手段】時系列画像を入力する画像入力手段と、時系列画像における追尾領域を特定する追尾領域特定手段と、追尾領域の動きベクトルを検出する動きベクトル検出手段と、検出された動きベクトルに応じて制限された追尾対象領域において、追尾領域を追尾する追尾処理手段とを備える。また、撮像装置の動きを検出する手段による動き検出結果を出力する動き検出結果出力手段を備えて、追尾処理手段が、動き検出結果から得られる動きベクトルに応じて制限された追尾対象領域において、追尾領域を追尾する。
(もっと読む)
情報端末装置
【課題】撮像画像を元に複数の人物の人間関係を容易かつ高い精度で推定できる情報端末装置を提供すること。
【解決手段】特徴量DB14は、人間関係を推定する判断基準となる顔についての特徴量を人間関係ごとに蓄積する。推定部12は、撮像部11から入力された画像から顔についての複数の特徴量を抽出し、抽出された複数の特徴量の各々における尤度を特徴量DB14に蓄積された顔についての特徴量を用いて人間関係ごとに算出し、算出された複数の尤度を統合して人間関係を推定力する。制御部13は、推定部12での推定結果に従って記憶部15から表示情報を読み出し、表示部16に表示させる。
(もっと読む)
瞳孔検出装置及び瞳孔検出方法
【課題】検出対象画像が低解像度であっても瞳孔検出精度を向上することができる瞳孔検出装置及び瞳孔検出方法を提供すること。
【解決手段】瞳孔検出装置100において、目領域実寸算出部102が、目領域の実スケール値を取得し、瞳孔状態予測部103が、瞳孔径の実スケール予測値を算出し、必要解像度推定部105が、算出された実スケール予測値に基づいて、解像度のターゲット値を算出し、目領域画像正規化部107が、算出された解像度のターゲット値及び目領域の実スケール値に基づいて、拡大/縮小倍率を算出し、算出された拡大/縮小倍率に基づいて目領域の画像を正規化し、瞳孔検出部108が、正規化された目領域の画像から瞳孔画像を検出する。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】確実に正しい動作や姿勢をとらせることができるようにする。
【解決手段】動作姿勢認識部22は、人を含む入力画像から、その人の身体の所定の部位の関節角を認識し、動作姿勢評価部23は、認識された入力動作の関節角と、基準動作姿勢データベース24に格納された基準動作の関節角に対して、所定の距離計算を行うことで、入力動作と基準動作との相違を評価し、支援画面生成部25は、その評価結果に基づいて、正しい動作や姿勢をとるための支援をする動作姿勢支援画面を生成して、表示部15に表示させることで、確実に正しい動作や姿勢をとらせることができる。本発明は、例えば、ユーザにより行われるジェスチャに対応する機能を実行するテレビジョン受像機に適用することができる。
(もっと読む)
重み付きテンプレートマッチング実行装置およびプログラム
【課題】マスキングを含む、重み付き相関を高速にかつ精度良く計算する。
【解決手段】FFTを用いて高速に演算する。テンプレート登録画像(テンプレート表示部102に表示)と、テンプレート側の重み(テンプレート側重み表示部103に表示)を持って、参照画像(参照画像表示部104に表示)と重み付きマッチングを行い、所定の閾値よりマッチングの評価値が高い位置(検知位置109の枠で表示)を検知する。重み付き相関はFFTを用いた高速な方法で行う。その他、参照画像側にも重みを付けることができ、FFTを用いた高速な方法で演算できる。
(もっと読む)
移動体検出装置及びプログラム
【課題】カメラの撮影映像から移動体を検出する装置の検出能力を高める。
【解決手段】移動体検出装置は、撮影映像から特徴点及び動きのある特徴点を抽出し、この抽出結果とテンプレートデータとを比較して移動体を検出する。テンプレートデータは、撮影映像において移動体が映る領域の位置情報、移動体が映っている状態での当該領域の特徴点及び動きのある特徴点の分布を表す空間分布特徴量が記述されたデータである。空間分布特徴量は、対象領域を区画化してなる区画毎の当該区画の特徴点数及び動きのある特徴点数を表す要素からなるベクトル量である。移動体検出装置は、上記抽出結果に基づき、テンプレートデータが示す領域に対応する移動体検出対象の領域において区画毎の特徴点数及び動きのある特徴点数をカウントして空間分布特徴量を生成する。そして、これとテンプレートデータが示す空間分布特徴量とを比較することにより、移動体を検出する。
(もっと読む)
情報システム、端末装置、広告出力方法、およびプログラム
【課題】撮影オブジェクトを短時間に決定し、短時間に広告を出力できない。
【解決手段】端末装置の位置情報と方向情報と視野角を有する端末情報を取得する端末情報取得部と、位置情報と方向情報と視野角を各オブジェクト情報の領域情報に適用し、1以上の撮影オブジェクトを決定する撮影オブジェクト決定部と、決定した1以上の各撮影オブジェクトに対応する1以上の広告情報を取得する広告情報取得部と、カメラ部が取得した映像と1以上の広告情報を出力する出力部とを具備し、撮影オブジェクト決定部は、端末装置との距離が近い順にオブジェクトを検査し、端末装置が撮影しているとして先に決定したオブジェクトの撮影により不可視となる領域として登録していき、可視領域がなくなった場合に、撮影オブジェクトの判断処理を終了する端末装置により、撮影オブジェクトを短時間に決定し、短時間に広告を出力できる。
(もっと読む)
地図生成装置、地図生成方法、移動体の移動方法、及びロボット装置
【課題】たくさんの人が存在する混雑な環境下で地図構築を行う。
【解決手段】ロボットが移動する間に連続して撮影した連続画像を取得する連続画像取得部11と、連続画像から各特徴点における局所特徴量を抽出する局所特徴量抽出部12と、局所特徴量抽出部12により抽出した局所特徴量について、連続する入力画像間でマッチングをとる特徴量マッチング13と、特徴量マッチング部13により所定数連続する画像間でマッチングが取れた局所特徴量の平均を不変特徴量として求める不変特徴量算出部14と、連続画像を取得した各時刻におけるロボットの位置に基づき各不変特徴量に対応する距離情報を算出する距離情報取得部15と、当該不変特徴量及び距離情報を有するハイブリッド地図として、局所メトリカル地図を生成する地図生成部16とを有する。
(もっと読む)
目立ち画像生成装置及び目立ち画像生成プログラム
【課題】評価対象の目立ちを色の差異を反映して定量的に評価する。
【解決手段】評価対象を撮像した撮像画像に対し、前記評価対象と周囲との色差が無い場合に目立ちが無いと評価し、前記評価対象と前記周囲との色差対比量が大の場合に、その大きさの度合いに応じて前記評価対象の目立ちを高く評価する色差目立ち評価部29と、前記色差目立ち評価部29の評価結果に基づいて、前記撮像画像の色差による目立ちの分布を示す目立ち画像を生成する画像化部25とを備える目立ち画像生成装置11を構成した。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
情報処理装置、およびその処理方法
【課題】画像データ中のサンプリングデータを用いて、高速に特定のパターンの識別を行い、種々の変動に対しても高速に識別を行う情報処理装置およびその方法を提供する。
【解決手段】画像処理装置は、画像における少なくとも1つの特定パターンに関して判定のための情報を登録し、画像データを入力し、入力した画像データから所定の特徴の分布を抽出し、特徴の分布を示す第1特徴分布マップを生成し、第1特徴分布マップの局在性を緩和させる変換を第1特徴分布マップに適用して第2特徴分布マップを生成し、第2特徴分布マップ上のサンプリングデータと登録された情報とを用いて、画像データが前記特定パターンのうちいずれのパターンかを判定する。
(もっと読む)
車線推定装置
【課題】走行安定性と車線追従制御性との双方を満足させることのできる目標走行線を設定する。
【解決手段】車線候補点設定部9aは撮像手段1で撮像した画像から走行車線の内側エッジを検出し車線候補点Pをプロットする。曲線近似処理部9bは車線候補点Pの点列に基づき、最小二乗法から推定車線Lpを求める車線推定式(y=ax2+bx+c)のパラメータ係数a,b,cを求め、今回の演算時を基準として設定時間幅tw前におけるパラメータ係数aの点列から曲線近似式を求め、この曲線近似式から設定時間進み後の予測パラメータ係数a’を設定する。車線位置設定部9cは予測パラメータ係数a’を、車線推定式に代入して設定時間進みtf後の推定車線Lpを求める。
(もっと読む)
画像処理装置、及びコンピュータプログラム
【課題】本発明は、設計データと輪郭線、或いは輪郭線間のマッチングを行うに当たり、両者の対応点を正確に特定する画像処理装置、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、第1の線分によって形成される第1のパターンと、第2の線分によって形成される第2のパターン間の位置合わせを行うときに、第1の線分と第2の線分上にそれぞれ第1の対応点と、第2の対応点を設定し、第1の対応点と第2の対応点間の距離に基づいて、第1のパターンと第2のパターンの位置合わせを行うためのアライメント量を算出すると共に、第1の線分と第2の線分の形状差に応じて、第1の対応点、及び/又は第2の対応点の位置を変化させる。
(もっと読む)
物体種別判定装置
【課題】特定種別の物体の検出漏れが生じることを抑制した物体種別判定装置を提供する。
【解決手段】赤外線カメラ2による撮像画像から、物体の画像部分を抽出する画像部分抽出部13と、前記画像部分について、特定種別の物体を想定して決定された複数の判定要素を抽出する判定要素抽出部と、前記複数の判定要素に対して抽出結果に応じた点数を付与すると共に、付与した点数の合計点である判定要素総合点を算出する判定要素総合点算出部15と、判定要素総合点が基準値以上であるときに、前記画像部分に対応する実空間上の物体の種別が前記特定種別であると判定する物体種別判定部16とを備える。
(もっと読む)
医療情報表示装置および方法、並びにプログラム
【課題】所望の医療情報を、より直感的な操作で、より容易に取得可能にする。
【解決手段】取得条件入力用ユーザインターフェース32が、被検体外観画像(人体アイコン45)の表示中に、ジェスチャの入力を受け付け、取得条件特定部35が、ジェスチャ種別解析部33によって判別されたそのジェスチャの種別、および、ジェスチャ部位解析部34によって特定されたそのジェスチャに対応する被検体の部位に基づいて、そのジェスチャに対応する医療情報を取得するための医療情報取得条件を特定し、医療情報取得部36が、特定された医療情報取得条件を満たす医療情報を、複数件の医療情報を記憶する医療情報データベース53から選択的に取得し、医療情報表示制御部36が、取得された医療情報を表示手段に表示させる。
(もっと読む)
画像処理装置、撮像装置、及び画像処理プログラム
【課題】撮像された画像から主要被写体の領域を予測することができる画像処理装置、撮像装置、及び画像処理プログラムを提供する。
【解決手段】画像処理装置140は、画像における複数の特徴毎に、当該特徴の特徴量を算出する特徴量算出部141と、画像に含まれる領域であって特徴量毎に定まる領域を画像から検出し、識別子を設定する領域検出部142と、異なる特徴の特徴量に基づいて検出した領域同士を比較するための評点を、領域毎に算出する評点算出部143と、評点に基づいて、画像における領域の優先度を設定する優先度設定部144と、を備える。
(もっと読む)
特徴量取得装置、特徴量取得方法、類似画像検索方法およびプログラム。
【課題】画像データの特徴量を取得する特徴量取得方法において、比較的小さい次元数の特徴量で、画像毎の特徴の違いを適切に反映する特徴量を求められるようにする。
【解決手段】特徴量取得装置1が、前記画像データの画素値の平均および分散を算出し、算出した平均および分散に基づく特徴量を求める特徴量算出部314を具備する。データの特性を端的に示す指標である平均および分散に基づいて特徴量を算出することにより、画像毎の特性の違いを適切に反映し、比較的次元数の少ない特徴量を得ることができる。
(もっと読む)
161 - 180 / 1,043
[ Back to top ]