
Fターム[5L096FA66]の内容
Fターム[5L096FA66]に分類される特許
101 - 120 / 1,043
画像処理装置、それを備えた画像表示装置及び撮像装置、画像処理方法、並びに画像処理プログラム
【課題】関心物体のフレームアウトを防ぐようにユーザを誘導する画像を作成する。
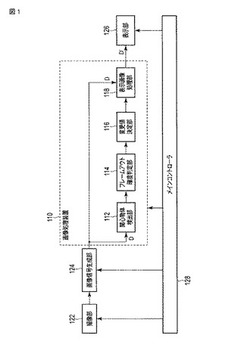
【解決手段】画像処理装置110は、画像データDを入力する。関心物体検出部112は、画像データDが表す画像における、関心物体の位置を特定する。フレームアウト確度判定部114は、関心物体検出部112が特定した関心物体の位置に基づいて、表示部126に表示させる画像の画像範囲から、関心物体がフレームアウトする確度と、フレームアウトする方向を算出する。変更値決定部116は、フレームアウト確度判定部114が算出したフレームアウトする確度及び方向に基づいて、画像データDが表す画像中の変更を施す領域である処理領域と、処理領域に施す変更とを決定する。表示画像処理部118は、変更値決定部116が決定した処理領域と処理領域に施す変更とに基づいて、画像データDが表す画像の処理領域に変更処理を施し、変更画像データD´を生成する。
(もっと読む)
動画処理装置及び動画処理方法

【課題】大気モデルに基づいて霧の天候のビデオを明瞭化させ、画面の視程を拡大し、かつ、画像のリアルタイム処理の要求を充分に満たす動画処理装置及び動画処理方法を提供する。
【解決手段】本発明の動画処理装置は、ビデオの霧除去過程において、ビデオを、メーンフレームとなるキーフレームと、サブフレームとなるノーマルフレームとに区分する。キーフレームに対し、距離パラメータとなるt(X)と天空点パラメータAとを改めて算出し、ノーマルフレームに対し、Aを算出せずキーフレームのAを利用する。ノーマルフレームの背景部分に対し、キーフレームに対応する領域のt(X)を利用し、ノーマルフレームの前景部分に対し、t(X)を改めて算出する。
(もっと読む)
車両用白線認識装置
【課題】遠方で左右の白線候補点が入り交じった状態においても各候補点を左右に正しく分離することができ、遠方まで白線を精度よく認識することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、左右の白線検出領域A毎に、互いに隣接する白線候補点Pdの連続性を順次判定し、予め設定された連続性を有して所定数以上連続する白線候補点の点群を第1のグループとしてグループ化し、グループ化された白線候補点のみを用いて仮白線近似線Ltを演算する。そして、左右の仮白線近似線Ltを基準とする候補点選定領域Asをそれぞれ設定し、左右の白線検出領域Aで検出した全ての白線候補点Pdの中から各候補点選定呂域As内に存在する白線候補点Pdを最終的な白線候補点Pとしてそれぞれ選定する。
(もっと読む)
ロボット、位置推定方法及びプログラム
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】回転可能なカメラの撮像画像から観測対象の人物の領域を検出し、検出された人物の領域に対して、カメラの回転角度を含む観測状況に基づいて複数の推定粒度の情報を有するパーティクルの推定粒度を変更し、各推定粒度を用いて観測対象の位置を推定するように構成する。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
適応フィルタリングを利用したデジタルイメージ安定化方法
【課題】デジタルイメージ安定化を正確にすると同時に、カメラ動きまたは全体動きのために起こる動きの特徴点を識別して、その特徴点のモーションベクトルを得るビデオデータプロセッシング方法を提供する。
【解決手段】デジタルイメージ安定化方法は、最適の特徴点を選択するための特徴点分類アルゴリズム、選択された特徴点のモーションベクトルを誘導するための計算的に効率的なタイルベクトル基盤の階層的ブロック検索アルゴリズム、サイズ比率基準及びアングル差基準に基づいて選択された特徴点をグループ化する特徴点モーションベクトルグループ化/比較アルゴリズムからなる。
(もっと読む)
車両用白線認識装置
【課題】演算時間を軽減しつつ、精度よく白線近似線を求めることができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、実空間上での白線の概略形状を近似する仮白線近似線の各係数を同定するに際し、前フレームで認識した白線近似線に基づいて低次側係数を同定し、同定されていない複数の高次側係数の組合せを、実空間上に投影された白線候補点Pd毎に当該白線候補点Pdの座標と低次側係数とを用いて複数パターン演算し、最も多く演算された高次側係数の組合せを仮白線近似線Ltの高次側係数として同定する。そして、仮白線近似線Ltを基準とする候補点選定領域Asを設定するとともに、当該候補点選定領域As内に存在する白線候補点Pdを最終的な白線候補点Pとして選定し、選定した白線候補点Pに基づいて白線近似線Lを演算する。
(もっと読む)
画像検出装置
【課題】円柱曲面上の対象画像を効率的に検出する画像検出装置を提供する。
【解決手段】所定の特徴領域を含む所定の平面状対象物が変形して所定の円柱状立体物の曲面上に巻き付くことにより、曲面上特徴領域を含む曲面上対象物として存在している、該曲面上対象物の情報を入力画像より検出する画像検出装置1を、入力画像より直線を検出し、該直線の2本同士で挟まれる領域として円柱状立体物を含む円柱領域候補を検出する円柱領域検出部10と、変形する前の特徴領域の外接矩形の所定の縦の長さ及び横の長さと、円柱状立体物の所定の半径と、特徴領域の所定の色情報とに基づいて、円柱領域候補の内部より曲面上特徴領域を検出する特徴領域検出部20と、抽出された曲面上特徴領域に基づいて曲面上対象物の位置情報を検出する対象物検出部30とを備えて提供する。
(もっと読む)
情報端末装置
【課題】特別なセンサ等を用いることなく、撮像部に対する被写体の空間的な動作によって表示部の情報を制御できる情報端末装置を提供する。
【解決手段】撮影画像より色特徴に基づいて被写体領域を抽出する領域形成部21、被写体領域を包含する第一の外接多角形を形成する第一多角形形成部221、第一の外接多角形の内部より被写体領域を排除した内部背景領域を抽出する内部背景抽出部222、内部背景領域を包含する第二の外接多角形を形成する第二多角形形成部223、第一の外接多角形、内部背景領域及び第二の外接多角形に基づいて、被写体の撮影部1に対する位置及び姿勢を推定する姿勢推定部23及び、推定された位置及び姿勢に基づいて表示部3を制御する制御部4を備えて情報端末装置10を提供する。
(もっと読む)
案内装置、案内方法、および、案内プログラム
【課題】目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供する。
【解決手段】設定された経路上の案内地点の目印となる目印対象物を特定し(S103)、目印対象物の配色に関する配色情報を取得する(S104)。配色情報に基づき、経路上であって目印対象物よりも手前にある目印対象物の配色と類似の配色である補正情報作成対象物を特定する。また、車両2が経路走行時に補正情報作成対象物の画像を補正用画像として取得し、取得色彩情報と既存色彩情報とに基づき、色補正情報を算出する。そして、算出された色補正情報に基づいて認識テンプレートを補正し、補正テンプレートを作成する(S110)。これにより、目印対象物の画像認識に用いる認識テンプレートが実際の見え方に近い色に補正されるので、目印対象物の認識精度を向上することができる。
(もっと読む)
画像出力装置、画像出力方法及びプログラム
【課題】鑑賞者までの距離を考慮した効果的な画像処理が施された画像を出力する。
【解決手段】撮像装置100であって、所定の表示部9から鑑賞者までの距離を特定する距離特定部5と、特定された距離に基づいて、複数の画像処理の中で所定の処理内容の画像処理を指定し、指定された所定の処理内容の画像処理を処理対象である画像に対して施す処理手段(アート変換処理部7c)と、画像処理が施された画像を所定の表示部に出力する出力制御部8とを備えている。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
第1の図形と第2の図形との間の位置関係を決定する方法、そのような方法を用いる装置、そのような方法のプログラム及び自動車運転模擬装置
【課題】2つの図形の位置関係を容易に決定できる方法を提供する。
【解決手段】本明細書に開示する自動車運転模擬装置10は、文字盤図形20の座標データ及び数字図形21a〜21rの座標データを入力する入力部10dと、入力した文字盤図形20の座標データから文字盤図形20の重心Cの第1重心座標を求め、且つ、入力した数字図形21a〜21rの座標データからこれらの数字図形21a〜21rの重心の第2重心座標を求め、且つ、第1重心座標及び第2重心座標に基づいて、文字盤図形20と数字図形21a〜21rとの間の位置関係を決定する演算部10aとを、備える。
(もっと読む)
ジェスチャー認識装置、ジェスチャー認識方法及びそのプログラム
【課題】ジェスチャーの認識精度を向上する。
【解決手段】撮像した対象の動作に基づくジェスチャーを認識するジェスチャー認識装置において、ジェスチャーの認識条件を設定する認識条件設定部と、撮像された画像を複数の領域に分割した分割領域毎に、分割領域内の各画素の輝度の変化量に基づいて動き量を検出する動き量検出部と、動き量検出部により検出された動き量が所定の閾値以上である分割領域を動き領域として検出する動き領域検出部と、動き領域検出部により検出された動き領域からジェスチャーの認識に採用すべき分割領域である特定領域を検出する特定領域検出部と、少なくとも、特定領域検出部により検出された特定領域と、認識条件設定部により設定されたジェスチャーの認識条件とに基づいて、ジェスチャーを認識するジェスチャー認識部と、を備える。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、安定して移動体の運動を精度よく推定することができるようにする。
【解決手段】画像撮像部によって異なるタイミングで複数の画像を撮像し、運動推定候補算出部によって、撮像した複数の画像の各々から、複数の画像間で対応した対応点を検索し、検索された対応点の全ての組から、対応点の複数の組を繰り返し選択し、繰り返し選択された対応点の複数の組に基づいて、自車両の運動推定候補を各々算出する。
信頼度判定部42によって、運動推定候補の信頼度を判定し、運動候補選定部44によって、複数の運動推定候補の各々の信頼度に基づいて、複数の運動推定候補のうちの何れか1つを選定する。使用判定部48によって、運動推定候補の分散値に基づいて、運動推定候補の使用可否を判定し、運動推定候補が使用可能であると判定された場合に、選定された運動推定候補を、自車両の運動の推定結果として出力する。
(もっと読む)
ジェスチャ入力装置
【課題】ユーザの身体にジェスチャ認識用の撮像装置を装着する場合においても、ユーザの意図しない指示が出力されることを低減することが可能なジェスチャ入力装置を提供することを目的とする。
【解決手段】ユーザの身体に装着される撮像装置7と、撮像装置7により撮像されるユーザの手指の撮像画像に基づいて、ユーザの手指のジェスチャを認識する画像認識装置2と、画像認識装置2により認識されるジェスチャに対応する指示を出力するコマンド認識装置3と、ユーザの身体の動きに伴う撮像装置7の姿勢の変動量を求める姿勢測定装置4及び撮像装置姿勢認識装置5と、その変動量に基づいて、コマンド認識装置3からコマンドが出力されることを許可する認識制御装置6とを備えてジェスチャ入力装置1を構成する。
(もっと読む)
ジェスチャ入力装置
【課題】本発明は、撮像装置からの撮像画像に基づいてジェスチャが認識される場合において、ジェスチャの誤認識を低減することが可能なジェスチャ入力装置を提供することを目的とする。
【解決手段】ユーザの身体に装着される撮像部11と、撮像部11により撮像されるユーザの手指の撮像画像に基づいて、ユーザにより行われる手指のジェスチャを認識するジェスチャ認識部12と、ジェスチャ認識部12により認識されるジェスチャに対応する動作制御指示を出力する指示出力部14と、ユーザの手指の撮像画像に基づいて実空間におけるユーザの手指の位置を求め、実空間において予め設定されるジェスチャ認識領域内にユーザの手指が存在するときのみ、指示出力部14から動作制御指示が出力されることを許可する指示出力許可部13とを備えてジェスチャ入力装置10を構成する。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
異常検知装置
【課題】拘束シーンのように複数人が密着して生じる異常を検知するのは困難だった。
【解決手段】互いに姿勢が異なる人物の形状を模した複数の姿勢別人物モデル211と、背景画像210とが予め記憶部21に記憶されている。撮像部20は監視空間を撮像して監視画像を出力し、変化領域抽出部220は背景画像210との比較により監視画像から変化領域を抽出し、姿勢判定部222は姿勢別人物モデル211のうち2以上を重ね合わせた複合形状を変化領域と形状比較して適合度を算出し、適合度が所定基準を超える姿勢の組み合わせを判定する。異常判定部223は姿勢判定部222により判定された姿勢の組み合わせが予め設定された異常な組み合わせと合致するときに異常信号を出力する。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測方法
【課題】画像と3次元形状モデルの誤対応を減らし、高速でロバストな物体の位置及び姿勢の計測を実現する。
【解決手段】物体の3次元形状モデルを保存する保存部110と、物体の濃淡画像を入力する濃淡画像入力部130と、物体の距離画像を入力する距離画像入力部150と、位置姿勢計測装置100に対する物体の概略の位置及び姿勢を入力する概略位置姿勢入力部120と、濃淡画像の情報を利用して、物体の概略の位置及び姿勢をもとに物体の第1の位置及び姿勢を算出するとともに、第1の位置及び姿勢を用いて算出される3次元形状モデルの画像面上での投影位置をもとに、距離画像から得られる3次元点群または当該3次元点群及び濃淡画像の画像特徴群と、3次元形状モデルとの対応付けを行い、当該対応付け結果に基づいて第2の位置及び姿勢を算出する位置姿勢算出部160を備える。
(もっと読む)
101 - 120 / 1,043
[ Back to top ]