
Fターム[5L096FA66]の内容
Fターム[5L096FA66]に分類される特許
81 - 100 / 1,043
プログラム、情報記憶媒体、端末、サーバ、及びマーカー表示体
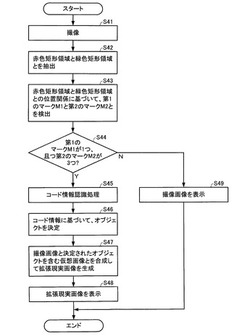
【課題】処理負荷を軽減し、マーカーをより正確に検出することが可能なプログラム、情報記憶媒体、端末及びマーカー表示体を提供すること。
【解決手段】第1の色条件を満たす複数の画素によって形成される第1の色領域に外接する第1の矩形領域と、第2の色条件を満たす複数の画素によって形成される第2の色領域に外接する第2の矩形領域とを、撮像画像から抽出し、第1の矩形領域、第2の矩形領域のうちいずれか一方が他方を内包する位置関係である場合にマーカーがあると判定する。
(もっと読む)
計測装置,計測方法および計測プログラム

【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
階層型構成要素ベースの物体認識
【課題】相互に相手を基準に移動可能な任意数の部分からなる可能性のある、イメージ中の物体を認識するための方法を提供する。
【解決手段】オフライン段階では、本発明は一連の例示イメージから単一の物体の部分の相対的な動きを自動的に学習し、単一の物体の部分の記述、部分間の関係、および効率的な検索戦略を組み込んだ、階層型モデルを構築する。これは、例示イメージ中の単一の物体の部分のポーズ変化を解析することによって実行される。ポーズは、物体認識に関する任意の類似性尺度によって取得できる。オンライン段階では、本発明は、階層型モデルを使用して検索イメージ中の物体全体を効率的に見つける。オンライン段階中には、物体の有効なインスタンスのみが見つけられ、すなわち、物体の部分は全体イメージ中ではなく、効率的な検索を容易にしてその後の妥当性検査ステップを不要にする階層型モデル内の物体部分間の関係によって定義される、パラメータスペースの制限された部分でのみ検索される。
(もっと読む)
ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム
【課題】各カメラによる画像に写っている像全体の位置をステレオ画像として適切となるように修正するための較正パラメータを算出するステレオ画像較正方法を提供する。
【解決手段】ステレオ画像較正方法は、第1及び第2のカメラから被写体を含む領域を撮影した第1及び第2の画像を取得し、第1及び第2の画像からそれぞれ被写体領域を検出し、各画像の被写体領域から被写体上の同一の点に対応する被写体特徴点の組を抽出し、被写体特徴点の組に基づいて、像面に対して平行な第1の軸及び第2の軸のそれぞれの周りの第1のカメラの回転角と第2のカメラの回転角の差による各画像上の被写体の位置のずれを補正する第1の較正パラメータを求め、第1の画像及び第2の画像の背景領域に写っている物体の像から各カメラの光軸周りの回転角の差による第1の画像と第2の画像間の回転を補正する第2の較正パラメータを求めることを含む。
(もっと読む)
画像処理装置
【課題】監視画像から背景画像を生成する画像処理装置において、監視空間内に似た色の服を着た人物が多く往来していたり、滞留する人物がいたりすると、生成した背景画像の一部に人の画素値が混入することがあった。
【解決手段】背景モデル生成部は、注目時刻より過去の入力画像の画素値から、注目画素300の特徴量の頻度分布330を生成し、当該頻度分布からなる背景モデルを生成する。背景特徴選出部は、注目画素300、近傍画素320の頻度分布330,340において集中度が最大ピークとなる正規分布331,342をそれぞれの画素の位置での背景特徴量として抽出する。背景モデル修正部は、注目画素300の頻度分布330のうち、近傍画素320の背景特徴量として選出される正規分布342に対応するものである正規分布332の頻度を高める修正を行う。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】ユーザの操作によって、作業空間における指示対象物に投影されたパターンを取得する画像取得部51と、該画像取得部51により取得された前記パターンから前記指示対象物の位置情報である座標を抽出する位置情報抽出部124とを備え、特定された前記指示対象物の位置情報に基づいた前記指示対象物に対する動作指示に基づいて、前記指示対象物に対する動作を実行する、前記作業空間を自律的に移動する自走式ロボットに用いられる位置特定装置101を採用する。
(もっと読む)
画像処理装置、画像処理方法、および制御プログラム
【課題】種々の条件において撮影された顔画像における唇の色を特定し、特定した唇の色を用いて唇の領域を特定することができる画像処理装置および画像処理方法を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の口を含む顔画像から唇の特徴を特定する画像処理装置であって、顔画像の肌の代表色を特定する肌代表色特定部17と、顔画像において、少なくともいずれかの領域が唇の一部を含むように複数の領域を設定し、各領域の代表色を候補色として特定する候補色特定部18と、肌の代表色と、各候補色との色相および彩度における差に応じて、複数の候補色から唇の代表色を特定する唇代表色特定部19とを備える。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する方法
【課題】携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する。定規で測るなどの不便を解消し、迅速且つ簡便に物体の正確な実際大きさを測定する。
【解決手段】携帯端末機に備えられたカメラを利用して撮影された物体イメージの大きさ及び物体とカメラとの間の距離を測定し、焦点距離などのカメラの特性と測定された値を利用して撮影された物体の実際大きさを算出する。手順は、(1)携帯端末機に備えられたカメラを利用して撮影された物体イメージを認識する段階と、(2)前記段階(1)で認識された物体イメージの大きさを測定する段階と、(3)前記物体と前記カメラとの間の距離を測定する段階と、(4)前記カメラの特性、前記段階(2)で測定された物体イメージの大きさ、及び前記段階(3)で測定された前記物体と前記カメラとの間の距離を利用して前記物体の実際大きさを算出する。
(もっと読む)
画像処理装置、情報提供システム及びプログラム
【課題】ユーザに提供する情報が関連付けられる画像要素の識別に必要な数の特徴点が含まれるような境界を画像に埋め込む際に、その境界の中心を、本構成を有しない場合に比して、当該画像要素の位置を特定する位置情報により特定される位置の近くに配置する。
【解決手段】マーカを画像に関連付ける位置を特定するアンカー及びアンカーにより位置が決定されるメディアアイコンを中に含む特徴境界の大きさ及び画像上における配置を決定する際、画像を識別可能な所定数以上の特徴点を含み、かつ特徴境界の半径及び特徴境界の中心点とアンカーとの距離の和が最小となるよう調整しながら決定する。
(もっと読む)
路面上パターン認識方法および車両用情報記録装置
【課題】単純な処理により認識を可能にすると共に、誤認識の発生を抑制する。
【解決手段】画像フレームのグレースケールデータを入力し(S11)、第1の画像フレームの中に第1の処理対象範囲を割り当て(S13)、前記第1の処理対象範囲の画像データを所定の方向に走査して特定の線状パターンを表す複数のパターンエッジの組み合わせを検出し(S14)、前記線状パターンが1回検出された後で大きさが小さい第2の処理対象範囲を、検出された前記線状パターンの位置を基準にして決定し(S16)、第2の画像フレームの中で、前記第2の処理対象範囲の画像データを所定の方向に走査して前記線状パターンを検出し(S18)、前記線状パターンを複数回連続的に検出した場合に、該当する線状パターンを有効なパターンとして認識する(S21)。
(もっと読む)
オブジェクト追跡装置、方法、及びプログラム
【課題】オブジェクトを追跡する際に、オブジェクトの位置推定の精度を向上させる。
【解決手段】位置予測手段14は、2以上のフレーム画像間のオブジェクトの動きに基づいて、処理対象のフレーム画像におけるオブジェクトの位置を予測する。位置マップ生成手段15は、予測された位置の周辺の複数の位置とオブジェクトの存在確率を示す値との対応関係を位置マップとして生成する。特徴量計算手段16は、予測された位置の近傍の複数の位置のそれぞれでオブジェクトらしさを示す特徴量を計算し、アピアランスマップを生成する。位置推定手段17は、位置マップとアピアランスマップとを組み合わせ、処理対象のフレーム画像におけるオブジェクトの位置を推定する。
(もっと読む)
姿勢推定装置、姿勢推定システム、および姿勢推定方法
【課題】関節を有する物体の姿勢を高精度に推定することができる姿勢推定装置を提供すること。
【解決手段】姿勢推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢の推定を行う装置であって、姿勢毎に、部位の位置を規定する基準モデルを格納する基準モデル格納部140と、姿勢毎に、密集部分の重みが小さくなるように部位に対して重み付けを行う重み付け算出部150と、重み付けを適用して基準モデルと物体とを比較することにより、物体の姿勢を推定する姿勢推定部160とを有する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】精度良く線分を抽出することができる画像処理装置を提供する。
【解決手段】画像に含まれる線分を抽出する画像処理装置であって、画像の所定数の画素からなる処理単位ごとに、濃度が変化する方向である濃度変化方向を決定する濃度変化方向決定部と、濃度変化方向が反対向きの一対の処理単位を処理単位対とし、濃度変化方向と垂直な方向に連続して配置されている複数の処理単位対を含む処理単位群を線分として抽出する線分抽出部とを備える。
(もっと読む)
距離算出プログラム、距離算出方法及び距離算出装置
【課題】画像内から距離算出に適切な対象物を特定し、この対象物からカメラまでの距離を適切に算出すること。
【解決手段】カメラから画像を取得し、画像から、路面上にある特徴点を規定する抽出条件を満たす特徴点を抽出し、抽出された特徴点からカメラまでの実空間での距離を、画像内での特徴点の位置に基づいて求められる特徴点のカメラに対する実空間上での角度と、カメラの俯角及び路面からの距離を含む設置情報とを用いて算出する、処理をコンピュータに実行させる。
(もっと読む)
車線境界検出装置及び車線境界検出方法
【課題】処理負荷を軽減しつつ、安定して車線境界を検知する。
【解決手段】自車走行路を撮像した画像から路面上の車線標示を検出し、検出した車線標示から車線標示が3重線か否かを判定すると共に、上記検出した車線標示の標示幅と車線標示間の距離とに基づき、対をなす減速標示の組を検出する。そして、上記3重線と判定した場合には、上記検出した対をなす減速標示の各位置から車線区分線の位置を推定する。
(もっと読む)
計測点からの円筒情報の抽出方法
【課題】
本発明の課題は、円筒表面の計測点から円筒データを確実に作成できると共に、高精度な近似が可能な計測点からの円筒情報の抽出方法を提供することにある。
【解決手段】
上記課題を解決するために、本発明では、最初に計測点から球の中心を定め、次に、球の中心を円筒の仮中心点とし2つの角度を変化させて投影方向を定めて計測点を投影し、円周と投影した計測点の距離の二乗の総和が最小になる角度を選択し、次に、当該角度を収束計算で精度向上させ、最後に、精度向上させた角度、仮中心点を当該角度で投影した値を円筒中心の初期値とし、円周と投影した距離の二乗の総和が最小になる角度および円の中心点を定めることによって、短時間で精度の良い円筒の半径、中心、中心軸を得ることを特徴とする。
(もっと読む)
画像プロフィールに由来する物体検出
【課題】連続するビデオフレーム間の、あるいは画像対間の回転変化を発見するための方法を提供する。
【解決手段】効率的なフレーム間の回転の度合いが決定される。画像フレームの一対の大域的なXY整列が遂行される。X及びYの積分投影ベクトルの各々の少なくとも一部分が決定され、整列された大域的なベクトルは、局所的な有意な差分を明示する。X及びYの積分投影ベクトルの少なくとも一部分でのX及びYの位置に基づいて、画像フレームのシーケンス内における少なくとも一の移動物体の位置、相対速度、及び/又は近似の領域が決定される。
(もっと読む)
電子機器及びプログラム
【課題】画像内の被写体のサイズに対応した表示レンジを設定して、画像と図形とを重ね合わせて表示する。
【解決手段】関数電卓1は、表示部15と、所定の各基準物における少なくとも1つの特定部分と、当該特定部分の実長とを対応付けて記憶する基準物テーブル132と、複数の画像を記憶する記憶部13と、記憶部13により記憶された画像のうち、ユーザ操作に基づいて指定される指定画像を表示手段に表示させるCPU11とを備える。CPU11は、指定画像中の基準物における特定部分を検知して特定画像部分として設定し、複数の座標軸により定まる座標系を指定画像に重ねて設定するとともに、当該指定画像中の特定画像部分の実長に基づいて座標系の表示レンジを設定し、ユーザ操作に基づき指定画像に重ねて図形を表示させる。
(もっと読む)
車両検出装置
【課題】検出した物体の位置データを的確にグループ化して先行車両等の車両を的確に検出することが可能な車両検出装置を提供する。
【解決手段】車両検出装置1は、画像T上で、統合処理手段11が画像中の画素を抽出して統合した各画素領域gの中から車両のテールランプTLに対応する可能性がある画素領域gをランプ候補gLとして抽出するランプ候補抽出手段12と、位置検出手段9が検出した位置データをグループ化して生成した各グループGについて、ランプ候補gLを含むグループGL同士を再グルーピングした後で、全てのグループG同士を再グルーピングするグルーピング手段14とを備え、再グルーピング処理では、ランプ候補gLを含むグループGL同士の再グルーピングを行う際の閾値Δdp等が、その後の全てのグループG同士の再グルーピングを行う際の閾値Δdp*等よりも、再グルーピングし易い閾値とされている。
(もっと読む)
81 - 100 / 1,043
[ Back to top ]