
Fターム[5L096FA66]の内容
Fターム[5L096FA66]に分類される特許
21 - 40 / 1,043
画像処理装置、方法及びプログラム
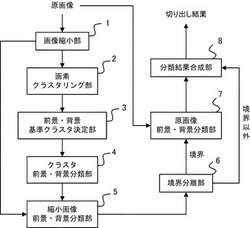
【課題】高速かつ自動的に画像から物体を切り出すことができる画像処理装置、方法及びプログラムを提供する。
【解決手段】画像処理装置は、画像について画素単位にクラスタリングを行うことにより複数のクラスタを生成し、生成されたクラスタの中から、クラスタに属する画素の位置に基づいて、前景の判定基準となる基準クラスタと、背景の判定基準となる基準クラスタとを選択し、生成されたクラスタを、基準クラスタとの類似度に基づいて前景又は背景に分類し、各クラスタの画素を、クラスタの分類結果に基づいて画素単位で前景又は背景に分類する。
(もっと読む)
目標物を検出するための映像処理方法及び装置

【課題】ステレオカメラなどから獲得した映像の深さ情報のみを用いて目標物領域である手領域を抽出する方法を提供する。
【解決手段】映像の深さ情報を獲得する映像獲得部、映像の深さ情報に対するヒストグラムを生成するヒストグラム生成部、上記映像から検出対象の領域を検出するための深さ情報のしきい値を設定するしきい値設定部、上記設定された深さ情報のしきい値を用いて検出対象の領域を抽出するイメージ処理部、上記抽出された検出対象の領域が目標物に対応するか否かを検証するデータ検証部、及び上記抽出された検出対象の領域を格納する格納部を含み、映像の深さ情報を用いて目標物を検出できるようにする。
(もっと読む)
映像処理方法及び装置
【課題】深さ情報のみを用いて被写体を検出するに当たって、演算処理速度を高める。
【解決手段】映像処理方法は、映像の深さ情報を獲得するステップと、前記映像から目標物が存在する領域に対する第1関心領域を分離するステップと、前記第1関心領域から目標物に対する候補領域を検出するステップと、前記検出された候補領域が目標物に対応するか否かを判断するステップと、前記候補領域が目標物に対応する場合、前記候補領域を用いて目標領域を検出するステップと、前記検出した目標領域を用いて目標物の姿勢を推定するステップと、前記目標物をモデリングするステップと、を含む。
(もっと読む)
画像検索に適した特徴ベクトルを抽出するプログラム、方法及び画像検索装置
【課題】画像検索の際に、比較すべき画像に回転及びスケールの違いがあっても高い検索精度で、少ない計算資源で実行することができる特徴点の特徴ベクトルを抽出する。
【解決手段】m個の特徴点集合について、特徴ベクトルの抽出対象となる注目特徴点p0からk1番目に近傍の特徴点qを選択し(S1)、直線p0−qの距離rを導出し(S2)、p0を中心とし且つ距離rを半径とした円周から、所定長の近傍に含まれる1つ以上の特徴点集合Bを導出し(S3)、p0とBの各特徴点bとについて、角度が一定となるように回転させて、m個全ての特徴点を用いて、p0の特徴ベクトルfを算出する(S4)。
(もっと読む)
消失点推定方法、消失点推定装置及びコンピュータプログラム
【課題】消失点の推定精度を向上すること。
【解決手段】入力された画像に含まれる直線を検出し、直線の中から、略垂直の直線である垂直方向直線を検出し、画像に含まれる直線のうち垂直方向直線ではない直線である非垂直方向直線と、垂直方向直線との組合せのうち、その端点同士の距離が閾値よりも短い組合せを組合せ候補として検出し、組合せ候補の中から、垂直方向直線と非垂直方向直線とが類似している組合せ候補を消失線組合せとして選択し、選択された複数の消失線組合せにおける、複数の非垂直方向直線に基づいて消失点の位置を推定する。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
ビジュアル比較方法
【課題】クロスブラウザテストを実行するときに、ビジュアル比較及びエラー予測を改善する方法を提供する。
【解決手段】第1の複数の画像対が評価され、エラーと見なすのに適格な視覚的な対的相違が検出される。視覚的な対的相違は、位置、大きさ、色又はスタイルのうちの少なくとも1つに関する違いとし得る。評価された視覚的な対的相違に基づいて予測エンジンが訓練される。第2の複数の画像対に関する情報が受信される。これらの画像対の各々は、クライアントティア環境において実行されたイベント・ドリブン・アプリケーションの視覚的なエンドユーザ体験画面の少なくとも一部を有する。予測エンジンを用いて、これらの画像対の各々が評価され、エラーと見なすのに適格な視覚的な対的相違が検出される。少なくとも1つの評価された対的相違がエラーと見なされるべきでなかったことを指し示すユーザフィードバックに基づいて予測エンジンが再訓練される。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
入力体の動き検出方法およびそれを用いた入力デバイス
【課題】1台の光学的撮像手段を用いた画像解析から、人の手先の三次元的な動きを検出することのできる入力体の動き検出方法と、この動き検出方法を用いた指示操作用の入力デバイスを提供する。
【解決手段】光源Lと、手先Hに対して光源Lと同じ側に配置された光学的撮像手段(カメラC)と、制御手段と、上記カメラCで得られた二次元画像から、拳の形状の分布重心の座標Gと指の先端の座標Tとを算出する形状認識手段と、上記拳の重心座標Gと指先座標Tの間の距離(d)を比較する動き判定手段と、を備えている。これにより、上記拳の重心座標Gと指先座標Tの間の距離(d)が、計測前後で縮小または拡大した場合に、その際の手先Hの動きを、上記カメラCの仮想撮影平面Pに対する指の上下動(Z方向の動き)として判断することができる。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
画像解析装置および画像評価装置
【課題】人物とその地点を代表するランドマークのようなオブジェクトとが被写体となるような撮影画像を解析してオブジェクトの位置を識別する。
【解決手段】オブジェクト探索領域抽出部303は、画像データから顔領域および胴体領域を除いてオブジェクト探索領域を抽出する。顕著領域候補抽出部304は、オブジェクト探索領域から複数の顕著領域候補を抽出する。独自色性算出部305は、オブジェクト探索領域の各画素の色情報を識別し、各色の独自色性を、その出現頻度および他の色との距離に基づいて定量的に算出する。存在確率算出部307は、オブジェクト領域の存在確率をブロック単位で算出する。オブジェクト領域識別部308は、各顕著領域候補の顕著領域としての尤度を算出し、最尤の顕著領域候補をオブジェクト領域に決定する。
(もっと読む)
外界認識方法,装置,および車両システム
【課題】物体までの距離によらず好適に,車両等の物体検出を行う。
【解決手段】自車周辺を撮影した画像を解析する外界認識装置100は,近傍を表す画像の第一領域,および遠方を表す画像の第二領域を設定する処理領域設定部101と,設定された第一領域において第一の識別器103により物体検出を行う第一の物体検出部104と,設定された第二領域において第二の識別器106により背景パターンをも考慮して物体検出を行う第二の物体検出部104と,検出された物体矩形を補正する矩形補正部107と,検出された物体矩形に基づき衝突までの予測時間を算出する衝突予測時間算出部108を備える。
(もっと読む)
人物属性推定装置、人物属性推定方法及びプログラム
【課題】シワ形状に係る特徴量を人物属性の推定を行うことができ、加えて、撮影環境の変化に対してロバスト性を有する人物属性推定装置を提供する。
【解決手段】発明の人物属性推定装置1は、広告媒体2aを閲覧する人物を撮影するカメラ2の画像から顔領域を検出する顔検出手段110と、事前に作成された顔モデルを顔領域にあてはめることで顔領域上における顔器官の位置を特定し、特定した顔器官の位置から、人物属性の推定に利用する特徴量を求める関心領域として、シワが発生し易い領域である第1の関心領域を顔領域に設定する関心領域設定手段111と、顔領域の特徴量として、第1の関心領域内のエッジ画像から勾配ヒストグラムを抽出する特徴量抽出手段112と、学習器130を参照し、特徴量抽出手段112が抽出した特徴量が属する人物属性の区分を特定する人物属性推定手段120を備えている。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
オブジェクト探索装置、映像表示装置およびオブジェクト探索方法
【課題】簡易な手順で高速かつ精度よくオブジェクトを探索できるようにする。
【解決手段】一実施形態に係るオブジェクト探索装置1は、画面フレームを複数に分割した複数の分割フレーム領域を一つずつ順に探索領域として設定する探索領域設定手段3と、分割フレーム領域に含まれるオブジェクトを探索して、探索されたオブジェクトの座標位置を検出するオブジェクト探索手段4と、探索されたオブジェクトの座標位置を基準として、過去と現在の画面フレームを比較して動き検出を行い、現在の画面フレームでのオブジェクトの座標位置を検出するオブジェクト追従手段5と、探索されたオブジェクトの座標位置と追従されたオブジェクトの座標位置とを比較して、重複する座標位置を削除して、オブジェクトの座標位置を特定する座標合成手段6と、を備える。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】文字認識処理によって文字画像ではない画像に対して文字画像であると認識された誤りを減少させるようにした画像処理装置を提供する。
【解決手段】画像処理装置の受付手段は、文字認識された文字候補画像と該文字候補画像に関する情報を受け付け、第1の判定手段は、前記受付手段によって受け付けられた文字候補画像に関する情報に基づいて、該文字候補画像が文字画像であるか否かを判定し、第2の判定手段は、前記第1の判定手段によって文字画像であると判定されなかった場合又は文字画像ではないと判定されなかった場合は、前記受付手段によって受け付けられた文字候補画像の特徴を抽出し、該文字候補画像が文字画像であるか否かを判定する。
(もっと読む)
21 - 40 / 1,043
[ Back to top ]