
Fターム[5L096FA66]の内容
Fターム[5L096FA66]に分類される特許
61 - 80 / 1,043
監視装置、監視方法及び監視プログラム
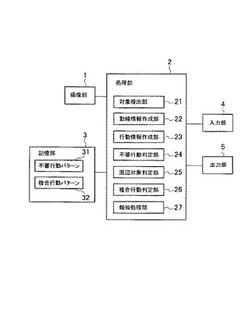
【課題】誤検出を低減し、高精度に不審対象を監視することができる監視装置を提供する。
【解決手段】対象検出部21は、撮像部1により撮像された動画像から監視する対象を検出する。動線情報作成部22は、対象検出部21により検出された対象の移動ベクトルから動線情報を作成する。不審行動判定部24と、動線情報から、予め設定された不審行動パターン31に基づいて、対象検出部21により検出された対象が不審対象候補か否かを判定する。複合行動判定部26は、不審対象候補の動線情報と、不審対象候補の周辺に存在する周辺対象の動線情報とから、予め設定された条件である複合行動パターン32に基づいて、不審対象候補が不審対象か否かを判定する。
(もっと読む)
照合装置

【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
注目領域推定装置、コンピュータプログラム及び注目領域推定方法
【課題】注目被写体の領域の推定精度を向上すること。
【解決手段】画像において、注目されている被写体が写った領域である注目領域を推定する注目領域推定装置である。画像から注目領域の候補である候補領域を検出し、画像から消失点の位置を検出し、消失点の画像上の位置と候補領域の画像上の位置とに基づいて、実空間における候補領域の位置を推定し、実空間における位置の推定結果に基づいて、候補領域の中から注目領域を推定する。
(もっと読む)
オプティカルフロー生成装置、生成方法、プログラム
【課題】入力画像のより広範囲な領域でオプティカルフローを生成するための技術を提供する。
【解決手段】オプティカルフロー生成装置1は、外部環境の輝度と外部環境までの距離を測定して取得し、入力画像として、輝度画像データ及び距離画像データを生成可能な外部カメラ2と、輝度画像データと距離画像データと輝度勾配の拘束条件に基づいて第1運動パラメータ拘束条件を生成する第1運動パラメータ拘束条件生成部9と、距離画像データと距離情報の拘束条件に基づいて第2運動パラメータ拘束条件を生成する第2運動パラメータ拘束条件生成部10と、第1運動パラメータ拘束条件と第2運動パラメータ拘束条件に基づいて運動パラメータQを算出する運動パラメータ算出部11と、運動パラメータQに基づいて入力画像の二次元オプティカルフローを生成する二次元オプティカルフロー生成部12と、によって構成されている。
(もっと読む)
状態追跡装置、方法、及びプログラム
【課題】局所最適解に陥ることを防止して、追跡対象の状態を追跡する。
【解決手段】類似性データ記憶部34に、観測空間におけるパーティクルの類似性を定めた類似性データを記憶しておく。事後確率分布推定部26で、前時刻に事前確率分布予測部28で予測された事前確率分布と、観測取得部24で実際に取得された観測とに基づいて、追跡対象の状態の事後確率分布を推定し、事前確率分布予測部28で、事後確率分布推定部26で推定された事後確率分布に従ってサンプリングされた現在のパーティクル、及び類似性データに基づいて、現在のパーティクルと観測空間において類似するパーティクルを用いて、次時刻の追跡対象の状態の事前確率分布を予測する。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
歩行者検出装置
【課題】監視エリアを所定時間毎に撮影して取得した画像を処理して、監視エリア内の歩行者を検出するときの検出精度を高める。
【解決手段】監視エリア100内を歩行者101が矢印102の方向に移動する。歩行者101の足は片方ずつ交互に動き、交互に静止する。領域103、104、105内の静止部分の下端の中心間距離は歩幅に対応し、領域103、104、105内の静止部分の発生周期は歩行周期に対応する。背景差分により異物画像201を検出し、フレーム間差分により移動物体画像202を検出する。背景差分とフレーム間差分との差分により、異物画像中の静止領域画像204を抽出する。隣り合う静止領域画像204の下端の中心間距離、発生周期が、歩幅、歩行周期に対応すれば、歩行者であると判定する。
(もっと読む)
シーンにおけるオブジェクトを分類する方法
【課題】オブジェクト分類は、3D距離データ用の正確な分類方法が必要であり、オブジェクトを分類する方法を提供する。
【解決手段】移動するオブジェクトが、1組の1つ又は複数の1次元レーザーラインスキャナーを備えたスキャナーによって取得された距離データの最大マージン分類及び識別確率的逐次モデリングに基づいて分類される。2次元画像の形態での距離データは、前処理され、その後分類される。分類器は、外観分類器と、種々の推論技法を用いる系列分類器と、オブジェクトの構造の状態機械実施とから構成される。
(もっと読む)
走行支援装置
【課題】特殊な照明装置を追加するといったコストアップを招くことなく、周期環境が暗い状況であっても障害物の検出精度の向上を図る。
【解決手段】光源検出部12は、光源対象領域Rdにおいて後続車両のヘッドライト(光源)に相当する面積を光源面積として算出する。そして、閾値算出部14は、算出した光源面積に応じて、後続車両検出部15において利用される差分法の閾値を設定する。この場合、後続車両検出部15は、撮像画像Ipにおいて検出領域R1,R2を設定し、評価パラメータである差分法の閾値に基づいて撮像画像を評価することにより、検出領域R1,R2内における障害物(併走車両)を検出する。
(もっと読む)
特徴選択方法及び装置、パターン識別方法及び装置
【課題】検定データが充分に存在しないような場合でも、データ中に含まれている特徴からパターン識別に適した特徴を、少ない処理コストで選択できるようにする。
【解決手段】識別対象を含む学習用のデータを用いて、識別器によって識別対象を識別するのに用いるべき特徴を選択する特徴選択装置は、学習用のデータから複数の部分データを抽出し、抽出された複数の部分データの各々を識別器によって処理させることで得られた識別値を、複数の部分データの各々についての特徴として取得する。特徴選択装置は、取得された特徴を、識別器により定義される識別空間での識別度に基づいて評価し、評価の結果に基づいて、複数の部分データについて算出された複数の特徴から、識別対象の識別に用いるべき特徴を選択する。
(もっと読む)
奥行き画像内の物体を検出する方法およびシステム
【課題】画像内の物体を検出するスキャンウィンドウ手法であって、計算効率が良い方法で、奥行き画像内の物体を検出する方法を提供する。
【解決手段】奥行き画像内の物体を検出する方法が、奥行き画像内の領域を覆う検出ウィンドウを決定することを含み、該検出ウィンドウのロケーションは、奥行き画像内の候補ピクセルのロケーションに基づき、検出ウィンドウのサイズは、候補ピクセルの奥行き値および物体のサイズに基づいている。検出ウィンドウ内の前景領域が、候補ピクセルの奥行き値および物体のサイズに基づいてセグメント化される。特徴ベクトルが、前景領域内のピクセルの奥行き値に基づいて求められ、特徴ベクトルが分類されて、物体が検出される。
(もっと読む)
画像追尾装置
【課題】テンプレート内の追尾対象が小さい場合であっても、背景の誤検出に伴うテンプレートの更新精度を維持する。
【解決手段】画像追尾装置は、被写界画像を生成する撮像手段と、追尾対象の特徴を示す基準情報を生成する生成手段と、被写界画像内の画像情報が類似する類似領域を抽出する抽出手段と、基準情報に基づいて新たな被写界画像から第1追尾対象候補の位置を検出する第1検出手段と、類似領域に基づいて新たな被写界画像から第2追尾対象候補の位置を検出する第2検出手段と、第1および第2追尾対象候補の位置に基づいて、第1および第2追尾対象候補が同一の追尾対象か否かを判定する判定手段と、判定結果に基づいて、第1および第2追尾対象候補の位置の一方を追尾対象の位置として選択する選択手段と、第1および第2追尾対象候補が異なる場合には、第2追尾対象候補の位置を基準として新たな基準情報を生成する更新手段とを有する。
(もっと読む)
画像処理装置及びプログラム
【課題】撮像手段により撮像された被写体の画像を含む撮像画像のうちで被写体の画像に対応する領域である被写体領域を検出する場合における、被写体領域の検出精度を向上させる。
【解決手段】撮像画像に基づいて、被写体領域の輪郭を構成する直線の候補を複数特定する直線候補特定部(24)と、特定された候補が被写体領域の輪郭を構成する直線となる確からしさを表す直線確度を、撮像画像に基づいて特定される、当該候補との間の距離が基準距離以内である位置の特徴量に基づいて算出する直線確度算出部(26)と、特定された複数の候補のうちから選出される4つの候補により囲まれる領域である領域候補が被写体領域である確からしさを表す領域確度を、該4つの候補の各々の直線確度に基づいて算出する領域確度算出部(30)と、算出された領域確度に基づいて被写体領域を検出する領域選択部(32)と、を含む画像処理装置である。
(もっと読む)
画像処理方法および監視装置
【課題】監視環境が時々刻々と変化するような場面でも、検出すべき物体の位置や速度と言った属性を正しく計測する。
【解決手段】撮像装置において撮像した入力画像を処理して、入力画像のエッジ情報を抽出し、エッジ情報に基づいてテンプレート画像を作成して記憶し、記憶されたテンプレート画像とその位置情報に基づいてテンプレートマッチング処理を実行し、マッチングに成功したテンプレートはその位置座標を更新し、マッチングに失敗したテンプレートは削除し、テンプレートマッチング処理の結果に基づいて検出すべき物体の位置や速度の少なくとも一つの属性を計測し、検出された物体の危険度を判定するようにする。
(もっと読む)
パターン選択装置、パターン選択方法、およびプログラム
【課題】候補パターンの偏りを防ぎ、効率的でバランスの良い候補パターンの選択を可能とする
【解決方法】本実施形態のパターン選択装置は、第1のパターン群と第1のパターンの評価に用いられる第2のパターン群とを格納した記憶部と、第2のパターンを参照して、第1のパターンの複数の評価値として、第1のパターンが第2のパターンをパターン認識する際の貢献度である第1の評価値と、第1のパターンが、第1のパターンが所属するクラスにおける標準的なパターンであるかを評価する第2の評価値、および第1のパターンがクラスの境界付近のパターンであるかを評価する第3の評価値を算出する評価値算出部と、算出された評価値と評価値ごとの重み付け情報とを用いて、第1のパターンごとのスコアを算出するスコア算出部と、算出されたスコアに基づいて第1のパターンからパターンを選択するパターン選択部と、を備える。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
画像処理装置及びプログラム
【課題】撮像手段により撮像された被写体の画像を含むカラーの撮像画像のうちで被写体の画像に対応する領域である被写体領域を検出する場合における、被写体領域の検出精度を従来よりも向上させる。
【解決手段】エッジ検出部(18)は、撮像画像を複数の色成分に分解して生成される複数の色分解画像の各々について、各画素におけるエッジ勾配の勾配方向及びエッジ強度を算出し、算出したエッジ勾配の勾配方向及びエッジ強度に基づいて、各色分解画像についてエッジ画素を検出する。合成部(20)は、各画素について、当該画素におけるエッジ強度が最大である色分解画像の当該画素におけるエッジ強度及びエッジ勾配を特定する。被写体領域検出部22は、エッジ検出部(18)により検出されたエッジ画素と、合成部(20)により特定されたエッジ強度及びエッジ勾配の勾配方向に基づいて被写体領域を検出する。
(もっと読む)
入力された発話の関連性を判定するための装置および方法
【課題】オーディオまたはビジュアルの向きを用いて入力された発話の関連性を判定する。
【解決手段】ある時間間隔における発話中のユーザの顔の存在を特定する。時間間隔の間のユーザの顔に関連づけられた顔の向きの特徴を取得する。ある場合には、入力された音に対する向きの特徴を判定する。顔の向きの特徴にもとづいて時間間隔の間のユーザの発話の関連性を特徴付ける。
(もっと読む)
特徴領域抽出装置、特徴領域抽出方法、及びプログラム
【課題】車両の検知に特有の誤検知を防止する。
【解決手段】領域抽出部102は、画像から二輪車の特徴部分に類似する領域と四輪車の特徴部分に類似する領域とを抽出する。組抽出部103は、領域抽出部102が抽出した領域の中から中心位置同士の距離が所定の閾値以下となる領域の組を抽出する。除外部105は、組抽出部103が抽出した組を構成する領域のそれぞれに異なる車両の特徴部分が含まれる可能性が低い場合に、当該組の構成する領域の一方を抽出結果から除外する。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
61 - 80 / 1,043
[ Back to top ]