
国際特許分類[A61B17/115]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 手術用機器,器具,または方法,例.止血器 (11,992) | 傷の閉鎖用,または傷を閉鎖把持するもの,例.手術用ステープル;それらと使用するための付属具 (2,011) | 吻合を行うためのもの;吻合用ボタン (461) | ステープラー (195)
国際特許分類[A61B17/115]に分類される特許
41 - 50 / 195
吻合器具および吻合を実施する方法
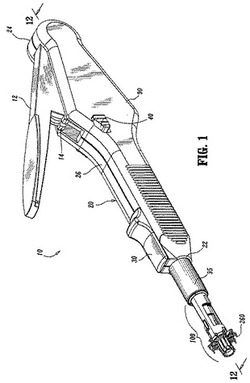
【課題】従来手順および最小侵襲性手順の両方の間に、遠隔縫合を実施するための改良された外科器具および方法の提供。
【解決手段】遠位端、近位端ならびに回動可能に取り付けられた少なくとも1つのハンドル12を有するハウジング26;複数の外科ファスナー260を解除可能に支持するよう構成された、ハウジング26の遠位端に取り付けられた装填ユニット100;ハウジング26から間隔を空けた関係にある第1の位置から、ハウジング26により近い第2の位置に移動可能であるハンドル12であって、アクチュエーターと協同して、第1の位置から第2の位置へのハンドル12の移動の際に複数の外科ファスナー260を変形するハンドル12;複数の外科ファスナー260上に配置可能な保持リングであって、外科ファスナー260の変形後に、保持リングと該外科ファスナー260との間の組織を固定するような寸法である、保持リングを備える外科器具10。
(もっと読む)
中空器官に吻合を行うステープル留め装置

【課題】外科処置領域への十分な妨げられることのないアクセスを可能にし、ステープルのいずれも不発にせずに中空器官端部の保証されたステープル留めを提供する、自動化されたフルプルーフ外科用ステープラーを提供すること。
【解決手段】ステープル留め装置が、クリップ保持器具及びステープル保持器具からなる。各器具には、ハンドル及びC字形ジョーが設けられる。組み合わせられた構成では、クリップ保持器具のC字形ジョーは、ステープルがクリップと整合した状態で、ステープル保持器具のC字形ジョーよりも下に位置決めされる。C字形ジョーは間隙を提供する。ステープル発射機構を動作させることによって、圧力をステープル全ての頂部に対して均一かつ同時に印加して、ステープルを保持ソケットから中空器官端部に強制的に貫通させてステープル保持クリップとステープル留め係合状態にする。
(もっと読む)
輪状吻合を実施するための外科用ステープルデバイス
【課題】輪状吻合を実施するための外科用ステープルデバイスを提供する。
【解決手段】外科用ステープルデバイス10であって、ハンドル部分12;該ハンドル部分から遠位に伸延する細長体部分14;アンビルアセンブリ30および複数のステープルを収容するシェルアセンブリ31を備えるヘッド部分16であって、該アンビルアセンブリは細長体部分の間隙部分と細長体部分接近部分との間で該シェルアセンブリに関して移動可能である、ヘッド部分;該アンビルアセンブリに解放可能に係合するアンビル保持具を備える接近機構;および該アンビル保持具によってスライド可能に支持されるトローカルを備える収縮可能トロカールアセンブリであって、該アンビル保持具中に位置付けられるトロカール収縮部分の間で、該アンビル保持具から伸延する前進部分まで移動可能である、収縮可能トロカールアセンブリを備える外科用ステープルデバイス、を提供する。
(もっと読む)
電気式手術器具
【課題】挟まれた組織が、組織の許容最大圧縮力を超えない手持ち式で、完全に電気駆動式の、制御された手術ステープラを提供する。
【解決手段】手術器具であって、可換部品を着脱可能に受ける受け部を有する手術用エンドエフェクタを具える。この受け部は通信接続を具える。エンドエフェクタに連結されたハンドルが、このエンドエフェクタを作動させる。このハンドルは、前記通信接続に電気的に接続され前記可換部品がエンドエフェクタに配置されたときに認証する制御部を具える。可換部品は、前記受け部に着脱可能に連結され、前記受け部に配置された場合に前記通信接続に電気的に着脱可能に接続される暗号化装置を具える。この暗号化装置は、前記電気制御部から問い合わせを受けた場合に前記可換部品を認証する。
(もっと読む)
電気式手術器具
【課題】手術処置を完了するために必要な時間枠内で所望の出力を供給する全体効率のために出力が最適化される手術器具を提供する。
【解決手段】作動時に外科的処置を及ぼすアクチュエータを具える手術用エンドエフェクタと、エンドエフェクタに機能的に接続され前記アクチュエータを駆動する電気モータと、モータに電気的に接続され、電源が前記モータを駆動するときにアクチュエータを作動させる電源であって、15秒より大きな動作期間の所定の定格出力の1以上の電池を有する電源とを具え、モータと電源が、所定の定格出力より大きな出力で電池602を用いることができる構成とする。
(もっと読む)
非接触電子的関節運動センシングのためのシステムおよび方法
【課題】様々なセンサを含む新規の改善された動力式外科用ステープラを提供する。
【解決手段】外科用器具は、ハンドル部分と、ハンドル部分から遠位に延伸し第1の長手方向の軸を規定している本体部分と、第2の長手方向の軸を規定し近位の端を有する関節運動ツールアセンブリと、関節運動ツールアセンブリを関節運動するように構成されている関節運動機構とを備え、関節運動ツールアセンブリは、本体部分の遠位の端に配置され、第1の位置から少なくとも第2の位置まで可動であり、第1の位置において、第2の長手方向の軸は第1の長手方向の軸に実質的に整列し、第2の位置において、第2の長手方向の軸は第1の長手方向の軸に対して斜めに配置され、関節運動機構はセンサ信号をマイクロコントローラに送信するように構成されている関節運動センサアセンブリを含み、マイクロコントローラは関節運動アセンブリの関節運動角度を決定するように構成される。
(もっと読む)
個別的なステープル高さ調節及び触覚フィードバックを伴う外科用ステープラー
種々の実施形態において、本体(10)と、本体に動作可能に結合されるステープリングヘッド(30)と、ステープリングヘッドに向かう及びステープリングヘッドから離れて選択的移動のために、ステープリングヘッドに対して可動に支持されるアンビル(50)と、アンビルの位置をステープリングヘッドに対して選択的に調節するように、本体によって支持されるアンビル調節シャフト(70)と、を備え得る、外科用ステープラー(1)が提供される。調節シャフト及び/又は本体は、調節シャフト回転に関係なく、アンビルとステープリングヘッドとの間に少なくとも1つの所定のステープル成形高さを確立するように構成され得る。加えて、調節シャフト及び/又は本体は、アンビル調節シャフトを回転させるユーザーに触覚フィードバックを提供するように構成されてもよく、それによっていつ適正なステープル成形高さに到達したかという指示をユーザーに提供する。本明細書に記載される構成要素の種々の統合によって、外科用ステープラーのために必要とされる部品数を低減し、それによって組立て時間及び製造費用を低減することができる。  (もっと読む)
(もっと読む)
外科手術用ハンドルアセンブリと外科手術用エンドエフェクタとの間で使用するためのアダプタ
【課題】直線駆動式エンドエフェクタを、動力を送達するために回転運動を使用する外科手術用デバイスおよび/またはハンドルアセンブリと互換性のあるものにすること。
【解決手段】少なくとも2つの機能を実施するように構成された外科手術用エンドエフェクタ20、30、40と、このエンドエフェクタを起動するように構成された外科手術用デバイス10とを選択的に相互接続するためのアダプタアセンブリ100が提供され、このエンドエフェクタアセンブリは、第一の軸方向に並進可能な駆動部材および第二の軸方向に並進可能な駆動部材を備え、そしてこの外科手術用デバイスは、第一の回転可能な駆動シャフトおよび第二の回転可能な駆動シャフトを備える。
(もっと読む)
電気式手術器具
【課題】エンドエフェクタの着脱可能および/または交換可能な部分を具え、同定装置を用いる手術器具を提供する。
【解決手段】可換部品を着脱可能に受ける受け部を有する手術用エンドエフェクタを具える。この受け部は通信接続を具える。エンドエフェクタに連結されたハンドルが、エンドエフェクタを作動させる。ハンドルは、前記通信接続に電気的に接続され前記可換部品がエンドエフェクタに配置されたときに認証する制御部を具える、可換部品は、前記受け部に着脱可能に連結され、前記受け部に配置された場合に前記通信接続に電気的に着脱可能に接続される暗号化装置を具え、暗号化装置が、前記電気制御部から問い合わせを受けた場合に前記可換部品を認証する構成とする。
(もっと読む)
剛性の遠位端部分を有する円形ステープラーイントロデューサー
患者内に外科用円形ステープラーを導入するためのイントロデューサー。様々な実施形態は、遠位端及び開放近位端を有し、円形ステープラーのステープル留めヘッド部分を、その内部に受容するように寸法決めされる、中空可撓性シースを含む。剛性のキャップアセンブリを、中空可撓性シースの遠位端に取り付けることができる。この剛性キャップアセンブリは、その内部にステープル留めヘッドが挿入されている場合に、ステープル留めヘッドの遠位面が覆われる、閉鎖位置と、ステープル留めヘッド及び細長形シャフトの周りから、キャップアセンブリを回収することができる、開放位置との間を、選択的に移動するように構成することができる。解放構成は、剛性キャップアセンブリと接合し、開放動作が解放構成に適用されると、剛性キャップが、閉鎖位置から開放位置に移動可能となるようになっている。  (もっと読む)
(もっと読む)
41 - 50 / 195
[ Back to top ]