
国際特許分類[A63H27/133]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 玩具の飛行機;その他の飛行玩具 (291) | 垂直離着陸可能な飛行玩具;飛行こま (73) | ヘリコプター;オートジャイロ (48)
国際特許分類[A63H27/133]に分類される特許
1 - 10 / 48
遠隔制御機器の駆動制御装置

【課題】模型ヘリコプタの駆動制御装置において、機体がヨー軸に対して回転運動をおこなっている場合でも、ロール軸およびピッチ軸の位相のずれに影響されずロールとピッチの操作が行える。
【解決手段】駆動制御装置は、ヨー軸角速度検出手段とメインロータ回転数検出手段を備え、これらの検出値から位相制御手段において、ヨー軸に対する回転運動によるロール軸およびピッチ軸の位相のずれ量を求め、ロール操作信号およびピッチ操作信号を補正して、ロールおよびピッチの制御を行うことができる。
(もっと読む)
自動復元フレームと航空機

【課題】転倒した姿勢から直立姿勢へ自動的に復元する航空機を提供する。
【解決手段】自動復元中央垂直軸から上方へ向けて伸びる突起部158を有する自動復元フレーム構成140を有している。フレーム構成内の中央ボイド146内部に設置することができ、浮上力を発生させる。電源176は自動復元フレーム内の中央ボイド内部に設置され、稼働可能状態で最低一つのローター172,173に接続され、そのローターに回転可能な電力を供給する。自動復元フレーム内の中央ボイド内部には、航空機を遠隔操作で離陸、飛行、着陸させるために電源に通信可能な状態で相互接続された、遠隔操作指令を受信するための電子装置178も設置されている。
(もっと読む)
遠隔操縦式ヘリコプタの操縦練習装置
【課題】R/Cヘリの操縦練習装置において、初心者から熟練者まで機体を損傷させることなく安全にホバリングの練習を行え、R/Cヘリの操縦技術を適正に習得することができるようにする。
【解決手段】基台3の上面に形成された開口部4aに、一端に球面軸受け8を介して機体スタンド7が連結され、他端にストッパ15が取付けられたマスト6を通し、開口部4a内でマスト6を上下移動及び傾倒自在に支持して構成される遠隔操縦式ヘリコプタの操縦練習装置2において、マスト6を傾倒自在なスライドガイドパイプ10に通して支持し、開口部4aの下側に、内部にスポンジからなる緩衝部材13が装填された、マスト6の傾倒範囲を制限するスカート状の筒体からなる傾倒規制体9を取付ける。
(もっと読む)
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置が提供される。上記リンケージ装置は、サーボステアリングエンジン動作システム、テールモーター動作システム、及び受信機制御装置(4)を備えている。上記サーボステアリングエンジン動作システムは、前後動サーボステアリングエンジン動作ユニット、及び左右動サーボステアリングエンジン動作ユニットを備えている。上記受信機制御装置(4)は、上記サーボステアリングエンジン動作システム及び上記テールモーター動作システムに同時接続され、上記前後動サーボステアリングエンジン動作ユニット及び上記テールモーター動作システムが同時に協働して作動するように制御可能になっている。従来の3チャンネルまたは4チャンネル模型ヘリコプターと比較して、本発明を適用した、同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターは、風抵抗の性能が優れており、屋外の風に対し速く飛行可能という要件を満たす。 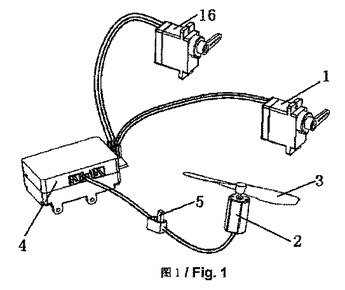 (もっと読む)
(もっと読む)
飛行機玩具
【課題】
【解決手段】
飛行機玩具において、プロペラ30、胴体50、着陸装置70を備えて、前記プロペラ30は、第1プロペラ310と第2プロペラ320を含み、前記第1プロペラ310は、前記胴体50の頂部に装着されて、前記第2プロペラ320は、前記胴体50と下部の着陸装置70との間で装着される。
(もっと読む)
無人回転翼機のモーター用の支持ブロック
無人機の各エンジンの支持ブロック130は、支持部131であって、当該支持部131に、無人機の推進ユニット100を駆動する電気モーター120と、当該モーターに連結されることを意図されている、推進ユニットの少なくとも1つの構成部材111が固定される、支持部131と、無人機を地上に支持するフット132と、支持部と支持スタンドとの間に延在する連結要素133とを備える。支持スタンドと連結要素はともに、電気モーターが支持部に固定されるように位置決めされる際に当該電気モーターのための隙間空間134を有する。 (もっと読む)
回転翼無人機用のナビゲーション電子カード支持体
本支持体300は、機械的振動を吸収する材料によって形成される機械的インターフェース310を介して、無人機内に設けられているハウジング内に固定されるように設計されている。環状形状の機械的インターフェースは、ハウジング内に設けられている対応する環状肩部上にフィットするように設計されている。ハウジング内のホルダーの固定部301は、少なくとも1つの接続支柱302がナビゲーション電子カード320を支持しているとともに該固定部の一端に自由に取り付けられている状態で、機械的インターフェース310を支持する。無人機用の電源バッテリー400もホルダー内に収納される。ナビゲーション電子カードは特に、無人機の重心に位置決めされるように該カードに配置される、加速度計のようなナビゲーションセンサー321を含むことができる。 (もっと読む)
プロペラ玩具
【課題】 走行及び飛行を可能とし、走行速度を調整することができるとともに、着地時或いは走行終了時に直ちに停止することのできるプロペラ玩具を提供する。
【解決手段】 本発明のプロペラ玩具1は、機体10と、前輪11と、機体10の後部に枢着された連結部材5を介して取付けられた後輪12と、機体10上方へ突出するように取付けられロータ用駆動モータにより回転駆動されるロータシャフト30,40と、該ロータシャフト30,40に取付けられたロータ3,4と、機体10の底面から下方に突出した制動部材と、を備え、制動部材を走行面に接地させて、機体10が僅かに前傾とされた略水平姿勢とされた停止状態にあるときに、ロータ用駆動モータによりロータシャフト30,40を駆動させて、車輪を走行面に接地させた状態で機体10の後部を浮上させた前傾姿勢とさせて走行を開始し、ロータシャフト30,40を更に高速で駆動させることで離陸させて飛行するように構成されている。
(もっと読む)
模型回転翼航空機の回転翼、及びその回転翼の製造方法
【課題】模型回転翼航空機に適用可能であり、実機により近いリアル性を有する回転翼、及びその回転翼の製造方法を提供する。
【解決手段】円筒状で所望の長さのアルミ合金管10を、ロール成形により、断面が翼断面形になるように成形する。これにより、模型回転翼航空機用の回転翼5aを中空構造に構成することができる。このため、回転翼5aは、重量が大幅に低減されたものとなる。そのような回転翼5aによれば、アルミ合金特有(金属特有)の重量感や重厚感をかもし出しつつ、金属素材につきまとう重量の問題も回避できる。しかも、回転翼5aは、アルミ合金管10を成形することで一層構造(一体構造)となり、強度も充分なものとなる。
(もっと読む)
ヘリコプター玩具
【課題】 操縦が容易であって、且つ、スティックレバーで操縦する場合とは異なる嗜好を提供可能である音声によって操縦可能なヘリコプター玩具を提供する。
【解決手段】 本発明のヘリコプター玩具1は、送信機と、ヘリコプター形状の飛行体と、を備え、この飛行体は、充電式電池と、ロータと、ロータを回転駆動するモータと、受信回路を有した飛行体側制御回路とを備え、送信機は、操作者が発する音声指示を識別する音声識別手段107と、音声識別手段107によって識別された音声指示に対応して所定の操作信号を出力する信号生成手段109と、補助操作スイッチ59と、を備え、音声指示は、モータの回転始動を指示する第1の指示と、飛行体の上昇を指示する第2の指示と、飛行体の高度の維持を指示する第3の指示と、飛行体の下降を指示する第4の指示と、モータの回転の停止を指示する第5の指示と、を含む。
(もっと読む)
1 - 10 / 48
[ Back to top ]