
国際特許分類[B60M1/28]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両のための動力供給線または軌条に沿っての装置 (816) | 車両における集電装置に接触するための動力供給線 (303) | 架線路;その付属物 (252) | 架線路の架設または修理 (102)
国際特許分類[B60M1/28]に分類される特許
1 - 10 / 102
検測用パンタグラフ装置及び架線検測装置
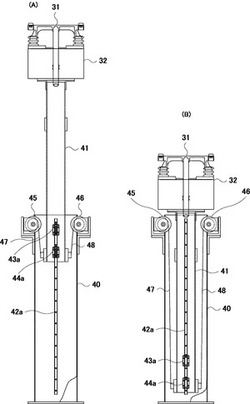
【課題】軌陸車の機動性、利便性を損なうことなく、軌陸車に搭載可能な小型でかつ軽量な検測用パンタグラフ装置を提供する。
【解決手段】検測用パンタグラフ装置は、相対的にスライド移動する外筒40と内筒41とから構成される伸縮機構手段と、伸縮機構手段の伸張方向に定荷重を付与する定荷重付与手段45〜48と、架線と接触するすり板手段31と、すり板手段に接触する架線の状態を検測する検測手段32とから構成される。これによって、すり板手段を架線に安定的に接触させることができる。また、すり板手段が安定的に架線に接触しているので、その接触個所の状態を検測手段で検測することができる。外筒と内筒とを用いることによって伸縮機構部を簡易に構成することができ、小型化かつ軽量化することもできる。
(もっと読む)
電気駆動ダンプトラック

【課題】トロリー線の結合区間があっても、トロリー走行中のドライバの操作負担を軽減し安定したトロリー走行を行うことができる電気駆動ダンプトラックを提供する。
【解決手段】車両制御装置50と、コントローラ100と、インバータ制御装置30と、操舵制御装置32とで構成される制御装置200は、車両本体1が、トロリー線結合区間Cに至る前の第1走行区間では第1トロリー線3L1,3R1に、トロリー線結合区間を過ぎた後の第2走行区間では第2トロリー線3L2,3R2に追従して走行するよう車両本体1にヨーモーメントを与える制御を行い、トロリー線結合区間では代表点から第2目標点に向かって所定の経路が設定され、この所定の経路に沿って、いずれは第2トロリー線3L2,3R2に追従して走行するよう車両本体1にヨーモーメントを与える制御を行う。
(もっと読む)
電車線路用監視システム
【課題】 大がかりな装置を設けることなく、監視対象設備の変位を推定することにより電車線路設備の総合的な監視を簡単で正確に、低コストで行う。
【解決手段】 電車線路用監視システム1は、監視対象に取り付けられる無線タグ2と、この無線タグ2が発した信号を受けて受信時刻を取得する測定ユニット3と、測定ユニット3からの受信時刻を演算処理して無線タグ2の取付位置を推定するロケーションサーバ4とで構成する。測定ユニット3は、無線タグ2の信号を受ける受信アンテナ5aを備えたタグリーダ5と、信号の受信時刻を内蔵の時計6aで記録する測定器6とを一組とする、各受信アンテナ5aが互いに異なる位置に配置された四組を備える。ロケーションサーバ4は、各測定器6からの時刻情報を受けて、各受信アンテナ5aでの受信時刻の時間差に信号の伝播速度を乗じて無線タグ2から各受信アンテナ5aまで距離の差を算出し、無線タグ2の位置を推定する。
(もっと読む)
接地棒の遠隔管理システム
【課題】作業後の接地棒を確実に回収することのできる接地棒の遠隔管理システムを提供する。
【解決手段】接地棒の遠隔管理システム1は、トロリー線に接地される接地棒2と監視装置40とから構成される。接地棒2には、監視装置40の第2の通信手段42との間で通信できる第1の通信手段12を備えている。また、懸下された状態を伝達する状態伝達部16を有し、この中には発光部16a、発音部16b、振動部16cを備える。さらに、懸下状態においてONとなる懸下状態判定手段14を備え、電源スイッチ6aがONの状態にあるとき、電池10からの電力供給と遮断とを切り替える。これにより、懸下状態にあるとき、状態伝達部16から発する発光情報D3、発音情報D4、振動情報D5と電池の残量情報D6とが、第1の通信手段12に入力される度に監視装置40側に送信される。
(もっと読む)
トロリ線データ比較装置
【課題】過去のトロリ線データと現在のトロリ線データとで走行位置を正確に一致させることを可能としたトロリ線データ比較装置を提供する。
【解決手段】車両の屋根上に配置されて鉛直上方のトロリ線を撮影するラインセンサカメラ2と、ラインセンサカメラ2から入力される映像信号を収録する画像録画部と、画像録画部から現在のトロリ線画像を入力するラインセンサ画像入力部5a、現在のトロリ線画像からトロリ線の摩耗及び偏位を抽出する摩耗・偏位抽出部5b、過去のトロリ線画像と現在のトロリ線画像とから車両の偏位の位置ずれ量を検出する偏位位置ずれ検出部5c、及び位置ずれ量を現在のトロリ線画像に反映し、過去のトロリ線画像と比較する摩耗量比較部5dを備える画像処理部とから構成した。
(もっと読む)
電車線位置計測装置
【課題】安価で正確な電車線位置計測装置を提供する。
【解決手段】電車線2のz方向の位置を計測するのに用いられる近接センサ18がパンタグラフ14に配設される。近接センサ18は、隣接する近接センサ18の検出範囲が重なるように、電車線2の付設方向と略平行な面内において千鳥状に2次元配置される。電車線2はz方向の位置を変えながら敷設されるため、工作車10を自走させると反応する近接センサ18が変化する。したがって、どの近接センサが反応したかを把握することにより、電車線2の位置を計測することができる。
(もっと読む)
トンネル工事における接地方法
【課題】接地用電線費用と接地工事費の低減が図れ、施工距離伸長に伴い前方へ随時移動する坑内キュービクル設置場所で接地抵抗が確認できるため、電気安全保安の面からも優れているトンネル工事における接地方法を提供する。
【解決手段】トンネル坑内に少なくとも、レール12、鋼製枕木14、鋼製セグメント10、鋼製支保工のいずれかを有するトンネル工事における接地工事方法であって、坑外に設けた接地点と、レール12、鋼製枕木14、鋼製セグメント10、鋼製支保工のいずれかと電気的に接続して接地極とし、トンネル工事の進捗に併せて接地極の設置抵抗を継続して測定する。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
パンタグラフの動特性の異常検出方法
【課題】 パンタグラフの動特性の異常によって影響を受けるトロリ線の挙動を監視することによって、パンタグラフの異常(動特性異常)を検出する方法を提供する。
【解決手段】 トロリ線Tのモニター位置P1には加速度計30が取り付けられており、トロリ線Tの上下加速度が検知される。監視されるパンタグラフ1がモニター位置P1を通過する際のトロリ線の振動(監視振動という)を加速度計30で測定する。一方、このパンタグラフが、正常な状態において、モニター位置P1を通過する際のトロリ線の振動(参照振動という)を加速度計30で測定しておく。そして、参照振動と監視振動とを比較して、運行状態におけるパンタグラフの動特性が正常であるか異常であるかを検出する。
(もっと読む)
トロリ線の摩耗状態監視装置
【課題】トロリ線とパンタグラフが離れたときに発生するアークを検知し、このときのトロリ線の下面、すなわち摩耗面を閲覧することができるトロリ線の摩耗状態監視装置を提供する。
【解決手段】トロリ線の摩耗状態監視装置において、車両10の屋根10a上にパンタグラフ11に向けて設置されパンタグラフ11を監視するエリアカメラ1と、前記車両10の屋根10a上に鉛直上向きに設置されトロリ線13の下面を撮影するラインセンサカメラ2と、前記エリアカメラ1及び前記ラインセンサカメラ2により撮影した画像を入力及び録画し、前記パンタグラフ11からアークが発生したときの前記ラインセンサカメラ2により撮影した画像を閲覧することができる画像処理装置3とを備えることとした。
(もっと読む)
1 - 10 / 102
[ Back to top ]