
国際特許分類[B60W10/18]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 制動装置の制御を含むもの (2,072)
国際特許分類[B60W10/18]に分類される特許
61 - 70 / 2,072
制駆動力制御装置および制駆動力制御方法
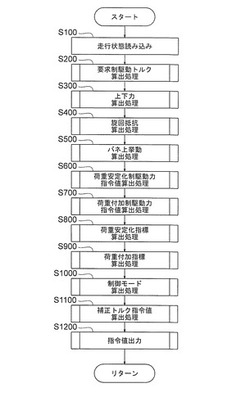
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
車両制御装置

【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
周辺監視装置および周辺監視方法、並びに運転支援装置
【課題】 物体を検出する際の計算量の低減を図り、もって物体の推定誤差の増大や計算不能となる事態を防止することができる周辺監視装置および周辺監視方法、さらには物体の存在に基づく運転支援を行うことができる運転支援装置を提供する。
【解決手段】 車両運転ECU1は、車両の周囲における障害物を検出して認識し、認識した障害物に基づいて、回避ルートの策定などの運転支援を行う。障害物の検出にあたり、認識信頼度が最高値である最高値グリッドと車両グリッドとの間に認識信頼度が中間値よりも大きいグリッドがある場合、虚の障害物を示すグリッドであるとして、当該グリッドの認識信頼度を最小値に修正する。
(もっと読む)
駆動装置および駆動制御方法
【課題】制動装置の摩擦材の状態を精度高く推定し、推定された摩擦材の状態に基づいて車両の駆動力を適切に制御する。
【解決手段】ECUは、回生制動パワーPrgを算出するステップ(S100)と、発熱量Jを算出するステップ(S102)と、磨耗量ABを算出するステップ(S104)と、磨耗量ABがしきい値AB(0)よりも大きい場合に(S106にてYES)、駆動力制限制御を実行するステップ(S108)と、乗員に通知するステップ(S110)と、磨耗量ABがしきい値AB(0)以下である場合に(S106にてNO)、通常駆動力制御を実行するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
車両駆動装置
【課題】モータ、減速部、及び差動部を有する構成において車両搭載性を向上させることができる車両駆動装置を提供すること。
【解決手段】回転動力を出力するモータ21と、モータ21からの回転動力を減速して出力するとともに減速比が切り替え可能な減速部22と、減速部22からの回転動力を一対の車輪14、15に向けて分配して出力する差動部24と、減速部22の減速比を切り替える切替部23と、を備え、モータ21、減速部22、及び差動部24は、車輪14、15の車軸方向の一軸上に並べて配置される。
(もっと読む)
車両用ブレーキ制御装置
【課題】負圧センサのような圧力センサを用いずとも、ブレーキペダルの踏込量に応じた減速度にて車両を減速させることが可能な車両用ブレーキ制御装置を提供する。
【解決手段】ブレーキペダル13のペダルストロークに応じて、車両に生ずべき速度減少量ΔVaを予測し、実際に車両に生じている速度減少量ΔVとの差Vに基づいて、その差Vが小さくなるように、車両に作用する制動力を制御する。このため、ブレーキ倍力装置20に供給される圧力を検出せずとも、ブレーキペダル13のストロークに対応する、適正な制動力を車両に作用させることができる。
(もっと読む)
ハイブリッド自動車の制御装置、ハイブリッド自動車およびハイブリッド自動車の制御方法、並びにプログラム
【課題】暖機運転を行いながらも燃費の向上に寄与すること。
【解決手段】エンジン10と電動機13と電動機13に電力を供給するバッテリ15とを有し、エンジン10もしくは電動機13により走行可能であり、またはエンジン10と電動機13とが協働して走行可能であり、エンジン10を暖機運転させる暖機運転スイッチ23を有し、暖機運転スイッチ23がON状態のときにはエンジン10の負荷として排気ブレーキ20を動作させるハイブリッド自動車1のハイブリッドECU18において、バッテリ15のSOCが所定のSOC以下のときには、暖機運転スイッチ23がON状態になるとエンジン10の負荷として排気ブレーキ20の動作に代えて、電動機13をバッテリ15に充電を行うように発電機として動作させる構成とする。
(もっと読む)
運転操作予測装置
【課題】ドライバのハンドル回避操作前の準備操作を検出することにより、限定的な状況下でのドライバのハンドル回避意思を高精度に予測する。
【解決手段】外部環境イベント及び運転操作イベントを検出し(S2)、外部環境イベントと運転操作イベントとの時間関係にルールが反応したとき、そのルールの結論に応じて重みを加算或いは減算することにより、ハンドル回避意思推定値Hを計算する(S3)。そして、制御介入の必要性を判定し(S4)、制御介入の必要性がある場合、ハンドル回避意思推定値Hの値を参照する(S5)。その結果、H>0の場合には、ドライバのハンドル操作による回避意思が高いものと判断して制御介入しない或いは介入を遅らせる等して制御介入を自重し(S6)、一方、H≦0の場合には、ドライバのハンドル操作による回避意思が低いものと判断してシステムによるブレーキ介入を実行させる(S7)。
(もっと読む)
制御装置、ハイブリッド自動車および制御方法、並びにプログラム
【課題】ドライバビリティを悪化させることなく、クーラのコンプレッサのON/OFF制御を行うこと。
【解決手段】エンジン10と電動機13と電動機13に電力を供給するバッテリ15とを有し、エンジン10もしくは電動機13により走行可能であり、またはエンジン10と電動機13とが協働して走行可能であり、エンジン10のトルクによって動作するクーラのコンプレッサ21を有し、少なくとも減速中に、電動機13により回生発電が可能であるハイブリッド自動車1のハイブリッドECU18において、クーラのスイッチがON状態であり、バッテリ15のSOCが所定値以下であるときに、コンプレッサ21がOFF状態になったときには、電動機13がバッテリ15を充電するための回生発電を実施するように制御する。
(もっと読む)
ハイブリッド型産業車両
【課題】発電電動機の寿命を長期化することのできるハイブリッド型産業車両を提供することを目的とする。
【解決手段】ハイブリッド型産業車両1は、エンジン2と、荷役に用いられる荷役用発電電動機3と、エンジン2および荷役用発電電動機3の両方から動力の供給を受けて駆動可能な荷役装置4と、ハイブリッド制御システム8とを主な構成として有する。ハイブリッド制御システム8は、荷役用発電電動機3の力行中においては、荷役用発電電動機3の温度に応じて荷役用発電電動機3の出力を抑制し、荷役用発電電動機3の回生中においては、荷役用発電電動機3の温度に応じて荷役用発電電動機3による回生量を抑制する。
(もっと読む)
61 - 70 / 2,072
[ Back to top ]