
国際特許分類[B60W10/18]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 制動装置の制御を含むもの (2,072)
国際特許分類[B60W10/18]に分類される特許
101 - 110 / 2,072
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
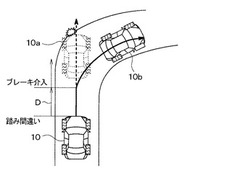
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
ハイブリッド車両の駆動制御装置

【課題】要求制動トルクをモータジェネレータによる制動トルクおよび機械式ブレーキによる制動トルクの両方で分担する場合に、エンジンを始動する際の駆動力変動をモータジェネレータによって適切に抑制できるようにする。
【解決手段】エンジン12を始動する際に、予め駆動系制動トルクの分担量上限値が制限され、それに伴ってモータジェネレータMGによる制動トルクの分担が低減される一方、その制動トルクの低下を補完するように油圧ブレーキ62による制動トルクの分担が大きくされる。このため、制動トルク制御とエンジン12の始動制御とが重なった場合でも、要求制動トルクに応じた制動トルクを発生させつつモータジェネレータMGによる制動トルクに余裕を残すことができ、そのモータジェネレータMGによる制動トルクの制御でエンジン12の初爆トルクを適切に吸収して駆動力変動を抑制することができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】コンデンサにおける回生電力の蓄電機能を向上させる。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)、第1電動機(MG1)及び第2電動機(MG2)と、電源手段(12)と、第1及び第2電動機の各々に対応するインバータ(710,720)及びコンデンサ(c1,c2)とを備えたハイブリッド車両を制御するものであり、回生を行うべき状態であるか否かを判定する回生判定手段(110)と、電源手段の蓄電量又は温度が所定の閾値以上であるか否かを判定する電源状態判定手段(120)と、一方の電動機で回生を行うと共に、他方の電動機の回転数をゼロに近づけるように制御する電動機制御手段(130)と、電源手段から他方の電動機に対応するインバータへの電力供給を遮断し、回生電力を他方の電動機に対応するコンデンサに蓄電させる蓄電制御手段(140)とを備える。
(もっと読む)
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することにある。
【解決手段】車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、車両の実旋回状態量を検出する挙動検出部と、車両の目標旋回状態量を算出し、当該目標旋回状態量と実旋回状態量とを比較し、車両の挙動を判定する挙動判定部と、挙動判定部で判定した結果に基づいて、3つの制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、3つの制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードと、を切り換える制御部と、を備えることで上記課題を解決する。
(もっと読む)
ハイブリッド車両における回生システム
【課題】クラッチの接続・非接続にかかわらずフリクションを抑えて回生量を十分に大きくとることができるハイブリッド車両における回生システムを提供する。
【解決手段】エンジン22と、モータ106と、エンジン22からの動力を後輪WRに伝達させるかを切り換えるクラッチ104と、クラッチ104を制御して、該クラッチ104の接続、非接続を行うクラッチアクチュエータ120と、エンジン22及びモータ106の駆動制御を行うとともに、クラッチアクチュエータ120を制御するMG−ECU102とを備えたハイブリッド車両における回生システム100において、MG−ECU102は、クラッチ104が接続の状態の場合は、モータ106を駆動制御してモータ106に回生を行わせるとともに、エンジン22を駆動制御して運転状態にし、クラッチ104が非接続の状態の場合は、モータ106を駆動制御して前記モータ106に回生を行わせる。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなくブレーキペダル操作量に応じた制動力を得ることが可能なブレーキ制御装置を提供すること。
【解決手段】 本発明では、ブースタの倍力が無効とされる第1のストローク領域を備えた液圧制御装置に、第1のストローク領域ではドライバ要求制動力を実現するようにホイルシリンダ圧の液圧サーボを行い、第2のストローク領域では、ストローク量に対応して設定された目標ホイルシリンダ圧と目標マスタシリンダ圧との関係を維持するようにポンプや制御弁を制御することとした。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
101 - 110 / 2,072
[ Back to top ]