
国際特許分類[B60W30/18]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 車両の推進に関するもの (159)
国際特許分類[B60W30/18]の下位に属する分類
動力伝達経路上の振動を低減させるもの (41)
国際特許分類[B60W30/18]に分類される特許
1 - 10 / 118
カーナビゲーションシステムを用いる車両走行制御装置
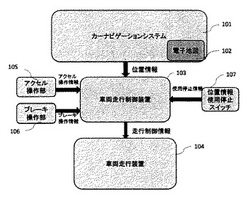
【課題】[0047]
近年、駐車場においてアクセルをブレーキと間違えて踏み、建物に突入したり、人身事故を起こしたりする事例が増えている。障害物を検知し自動停止する装置が自動車に実装されつつあるが、そもそもアクセルをブレーキと間違えて深く踏んでしまう事態には十分に対応できない。
【解決手段】[0048]
本発明によれば、駐車場のように建物の近くか内部にあり、人の往来も多い徐行すべき場所では、カーナビゲーションシステムの情報を用いて自動的に徐行になり、アクセルを過度に踏んでも徐行速度以上にはならず、車両自動停止装置が十分有効に機能することができる。
(もっと読む)
車両用走行制御装置

【課題】 ドライバの加速意図を反映しつつドライバの違和感を抑制することができる車両走行制御装置を提供すること。
【解決手段】 車両がカーブ路を走行する際、カーブ路の曲率に基づいて算出された目標車速V0*となるように車両を加減速制御し、加減速制御中にドライバのアクセルペダル操作が検出されると、検出されたアクセルペダル操作量(アクセル開度AP)に基づいて目標車速V0*を修正するとともに、目標車速V0*により発生する車両の横加速度αyよりも大きい横加速度を許容する許容車速Vuprよりも高くならないように目標車速V*を制限し、目標車速V*の制限中に許容車速Vuprが上昇した場合、アクセルペダルの操作反力Fを発生させると共に、アクセルペダル操作が検出されなくなるまで、加減速制御における車両の加速度を、許容車速Vuprを実現する加速度αy'よりも小さくなるように制限する。
(もっと読む)
車両および車両の制御方法
【課題】定常走行要求時に前方車両の挙動が減速条件を満たす場合には、現在の車速よりも減速した車速で駆動力変更運転を実行して、エネルギ効率を向上させる。
【解決手段】車両100は、走行駆動力を発生するモータジェネレータ130と、モータジェネレータ130を制御するためのECU300とを備える。
ECU300は、モータジェネレータ130について、所定のレベルの駆動力を発生させる第1の状態(低出力状態)と、第1の状態よりも大きい駆動力を発生させる第2の状態(高出力状態)とを切換える駆動力変更運転を行う。定常走行要求時に前方車両の挙動が減速条件を満たす場合には、現在の車速よりも減速した車速で駆動力変更運転が実行される。これによって、車両100の走行時のエネルギ効率を向上させる。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
動力伝達装置の制御装置
【課題】 登坂路の傾斜角に依存せず、車両が登坂路でスムーズに発進することができる動力伝達装置の制御装置を提供する。
【解決手段】 本発明の動力伝達装置の制御装置は、加速度センサを用いて車両が停車した状態に相当する際の停車状態相当加速度を算出する加速度算出工程S1と、変速機から駆動輪に出力される駆動トルクと後退トルクとの合成トルクの大きさが制動機構が駆動輪を制動する制動トルクよりも小さくなるか、又は、駆動トルクと後退トルクとの合成トルクの向きが車両を前進させる方向に向いているか、若しくは合成トルクが0になるように、制動機構が発生する制動トルクを漸減させつつ、動力源が発生させるトルクの大きさ及びクラッチトルクにより決定される駆動力を制御する後退防止工程S2と、を備える工程で動力伝達装置を制御する。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
車両の運転形式を選択するための方法
【課題】複数の運転形式(B1〜B3)の群から車両の運転形式(B1〜B3)を選択するための方法において、エネルギーを節約することができるか、または構成部分の摩耗を低減することができる車両装置の運転形式を選択するための方法を提案する。
【解決手段】群の1つ以上の運転形式(B1〜B3)について、特定の運転形式(B1〜B3)を実施する場合に走行力学的な状態変数の値があらかじめ規定された値範囲を超過するかどうかをチェックする(1a〜1c)ステップと、1つ以上の運転形式(B1〜B3)について運転パラメータの値を計算する(2A〜C)ステップと、チェックおよび計算の結果に関係して運転形式(B1〜B3)を選択するステップと、選択した前記運転形式(B1〜B3)を設定するか、または運転形式(B1〜B3)の自動的な変更を行うように運転手に示唆する信号(S1〜S3)を生成するステップとを含む。
(もっと読む)
車両の走行支援装置及び車両の走行支援方法
【課題】降車している運転手が車両を押し歩きする場合に、該押し歩きを支援することができる車両の走行支援装置及び車両の走行支援方法を提供する。
【解決手段】自動二輪車両の制御装置は、自動二輪車両の停車中に運転手が降車していると判定された第1のタイミングt1後に、該判定結果が維持された状態で自動二輪車両の移動開始が検知された場合(第3のタイミングt3)、車載のエンジンのエンジン回転数NEに基づく駆動力を駆動輪に伝達させる支援制御を行う。
(もっと読む)
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
1 - 10 / 118
[ Back to top ]