
国際特許分類[B60W40/04]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 周囲の環境に関するもの (507) | 交通の状態 (103)
国際特許分類[B60W40/04]に分類される特許
1 - 10 / 103
道路使用弱者保護システム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
走行車線認識装置
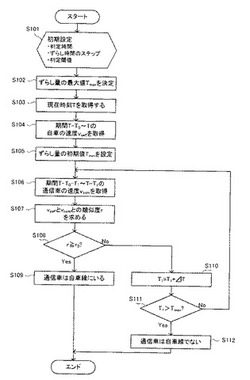
【課題】対象車が自車と同一車線上を走行しているか否かを判定する。
【解決手段】走行車線認識装置(100)は、第1の車両(10、30)に係る速度パターンである第1速度パターンと、第2の車両(20)に係る速度パターンである第2速度パターンと、を取得する取得手段(14、15、ANT)と、取得された第1速度パターンと、取得された第2速度パターンとの類似性に基づいて、第1の車両と第2の車両とが同一車線を走行しているか否かを判定する判定手段(11)と、を備える。
(もっと読む)
車両走行制御装置および車両走行制御方法

【課題】円滑な走行を妨げることなく、隊列同士の合流か交差が可能な車両走行制御を実施する。
【解決手段】車両走行制御装置は、自車両の状態を取得する車両状態取得手段と、他の車両との間で車両状態を交換する車車間通信手段と、自車両および他車両の車両状態に基づいて、車両を制御する車両走行制御手段と、を備える。そして、前記車両走行制御手段は、第1の道路を走行しているときに、該第1の道路と合流または交差する第2の道路上を走行している他の車両を検出した場合に、第1および第2の道路上の車両の位置を共通の車線上に対応させた位置を算出し、当該共通の車線上での車両の車間距離が適切になるように自車両の走行位置を調整する。
(もっと読む)
運転支援装置
【課題】運転者に与える違和感を少なくしつつ、適切に運転を支援することができる運転支援装置を提供すること。
【解決手段】車両の走行方向に配置された信号機の信号サイクルの情報を取得するインフラ通信部と、車両と信号機が配置された信号機地点との相対位置情報を算出する位置算出部と、位置算出部で算出した車両と信号機との相対位置情報と、インフラ通信部で取得した信号サイクルとの情報に基づいて、信号機が通過可能表示状態である間に信号機が配置された信号機地点を車両が通過できる速度域を基準目標車速域として算出し、基準目標車速域に基づいて目標車速域を決定する目標車速制御部と、目標車速制御部で決定した前記目標車速域を表示する目標車速表示部と、を有し、目標車速制御部は、信号機が通過可能な表示である場合、目標車速表示部に目標車速域を表示させ、信号機が通過可能な表示ではない場合、目標車速表示部に目標車速域を表示させない。
(もっと読む)
車載情報端末
【課題】車載情報端末においてオプティカルドットを利用した車両の走行制御を行う。
【解決手段】ナビゲーション装置は、車両前方の路面の撮影画像を取得し(ステップS10)、取得した撮影画像に基づいて、車両の進行方向に対する路面におけるオプティカルドットの配置間隔を算出する(ステップS30、S40)。こうして算出されたオプティカルドットの配置間隔に基づいて、車両を加速させるための加速制御または車両を減速させるための減速制御を行う(ステップS90、S120)。
(もっと読む)
運転評価装置及び運転評価システム
【課題】客観的に得られる渋滞情報に基づいて渋滞状況を判断することにより、公正な運転評価を行うことが可能な運転評価装置、及び運転評価システムを提供する。
【解決手段】車両走行時において、GPS受信部14により自車両の位置を検出し、道路交通情報受信部15により走行する道路の渋滞情報を取得し、この渋滞情報に基づいて、車両が走行した道路に渋滞が発生しているか否かを判定し、更に、渋滞の度合いを検出する。そして、渋滞の度合いに応じて、運転挙動に基づく運転評価対象データを補正する。従って、渋滞により安全運転、経済運転の評価が下げられることを防止でき、渋滞の影響を考慮した公正な運転評価が可能となる。
(もっと読む)
前を走行する車両の走行状態を予知するための方法
【課題】前を走行する車両の走行状態を予知するための方法を提供する。
【解決手段】前を走行する車両の後ろを走行する車両の自動車制御装置によって、前を走行する車両の走行状態を予知するための方法が提案される。まず、前を走行する車両の後ろを走行する車両の自動車制御装置によって、前を走行する車両の後ろを走行する車両のその都度の実際位置と、前を走行する車両とのその都度の実際間隔とから、前を走行する車両のその都度の実際位置を求める。前を走行する車両の後ろを走行する車両の自動車制御装置は、前を走行する車両のその都度の実際位置に適合する走行道路情報と、前を走行する車両のその都度の実際位置について求められた、前を走行する車両の動的走行情報とから、前を走行する車両の特性値を求める。続いて、前を走行する車両の後ろを走行する車両の自動車制御装置によって、前を走行する車両の特性値と、前を走行する車両の前方にある走行道路の走行道路情報とから、前を走行する車両の走行状態が予知される。
(もっと読む)
車両制御装置
【課題】車両制御装置に関し、制御の妥当性を自律的に判断し現場保存性及び利便性を向上させる。
【解決手段】車両10の周囲の対象を検出する第一検出手段11,12を設ける。また、第一検出手段11,12で検出された対象と車両10との接触時に、車両10を停止させる停止制御を開始する停止制御開始手段5aを設ける。さらに、停止制御の開始後に、車両10の乗員による対象の確認動作を検出する第二検出手段11〜15を設ける。また、その確認動作の検出時に、停止制御を終了させる停止制御終了手段5bを設ける。
(もっと読む)
進路評価装置
【課題】車両の干渉形態判定の切り替わりが頻繁に行われることを抑制して適切な評価が行える進路評価装置を提供すること。
【解決手段】 自車両の進路候補を生成し(S12)、他車両の進路を予測し(S14)、自車両の進路候補と他車両の予測進路の干渉形態について他車両が自車両に干渉する形態であるか、自車両が他車両に干渉する形態であるかを繰り返し判定し、先に判定された干渉形態が維持されやすいように干渉形態の判定基準を設定して干渉形態を判定し(S18)、その判定結果に基づいて自車両の進路候補の評価を行う(S20)。先に判定された干渉形態が維持されやすいように干渉形態の判定基準を設定して干渉形態を判定することにより、自車両の進路候補又は他車両の予測進路に検出誤差を生じた場合に干渉形態の判定が頻繁に入れ替わることを抑制することができ、安定した干渉形態の判定に基づき適切な進路評価を行うことができる。
(もっと読む)
運転支援装置
【課題】燃費を向上させるための車両の運転支援装置を提供する。
【解決手段】自車両のアクセル開度を検出する手段と、アクセル開度の時系列データに基づいて、該アクセル開度の自己相関関数を算出する手段136と、自己相関関数の値に基づき、自車両のアクセル操作の周波数を算出する手段137と、自車両の加速度を検出する手段と、加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段131と、パワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133と、を備える、燃費を向上させるよう車両の運転を支援するための装置である。この装置は、アクセル操作の周波数が所定値よりも低く、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
1 - 10 / 103
[ Back to top ]