
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
341 - 350 / 350
車両の姿勢制御装置

【課題】 車両旋回時の運転者の乗車感をさらに向上することを目的とする。
【解決手段】 車両1の姿勢を総合的に制御する姿勢制御ECUは、車両が旋回している時に、車両の所定時間T後の走行位置P2を演算する。そして、現在の走行位置P1から所定時間T後の走行位置P2への方向に回転軸Sを設定し、この回転軸S回りに車体1を回転して、車両姿勢を旋回外側に前のめりとなった状態にする。この姿勢最適化制御により、実際には車両1にピッチが発生しているにも拘らず、運転者に“車両1にピッチがなく、ロールのみが発生している”という自然な感覚を与えることができ、車両1の乗車感を向上することができる。また、姿勢制御ECUは、走行中の道路が直線である場合には、姿勢最適化制御を禁止してもよい。
(もっと読む)
車両運動特性推定方法及び車両運動特性推定用コンピュータプログラム、並びに車両運動特性推定装置

【課題】走行中の車両の運動特性を高精度で推定できるようにすること。
【解決手段】車両運動特性推定装置10に任意の位置に移動させることのできる横Gセンサ40及びヨーレートセンサ41を設ける。また、当該車両運動特性推定装置10には車速センサ46など車両1の走行状態を検出するセンサが複数備えられており、この車速センサ46等で検出した走行中の車両1の走行状態より、重心31位置を推定する。前記横Gセンサ40等は、推定したこの重心31位置に移動させる。これにより、重心31位置での横G及びヨー角速度を検出することができる。この横G及びヨー角速度から車両1の運動特性の1つである車両サイドスリップ角を求めることにより、重心31位置で検出した横G及びヨー角速度から車両サイドスリップ角を求めることができる。この結果、走行中の車両1の運動特性を高精度で推定することができる。
(もっと読む)
車両挙動制御装置
【課題】車両に作用するヨーモーメントを正確に算出して適切な車両挙動制御が行える車両挙動制御装置を提供すること。
【解決手段】旋回走行時において、車両のロールによる重心の横移動量を算出し(S12)、タイヤの撓みによる重心の横移動量を算出し(S14)、車両の前後力を算出し(S16)、旋回走行により横移動した記重心の位置から記左右の車輪までの距離及び左右の車輪における前後力に基づいて車両に生ずるヨーモーメントを演算する(S18)。これにより、車両の旋回走行時の重心横移動量を考慮して正確なヨーモーメントを算出することができ、適切な車両挙動制御が可能となる。
(もっと読む)
車両の運動制御装置
【課題】 車両が不安定となる可能性の程度を表す切迫度に応じて適切に減速制御を行ない得る運動制御装置を提供する。
【解決手段】 グリップ度監視手段M2において、車輪に対する横方向のグリップの程度を表すグリップ度を監視し、開始判定手段M3にて、このグリップ度を制御開始しきい値と比較し、比較結果に基づき、減速制御手段M1による車両の減速制御の開始判定を行う。更に、切迫度推定手段M4にて、車両の運転者の操作状態及び車両の運転状態の少なくとも一方(例えばグリップ度の変化割合)に基づき、車両が不安定となる可能性の程度を表す切迫度を推定し、この切迫度に応じて、しきい値設定手段M5により制御開始しきい値を設定する。
(もっと読む)
ヨーレイト推定方法
【課題】 高価なヨーレイトセンサを用いることなく、例えば軌道追従制御に必要・十分なヨーレイトを簡易に、しかも適切に得ることのできるヨーレイト推定方法を提供する。
【解決手段】 左右に対をなす前輪および後輪を備えて上記前輪および/または後輪を操舵して走行駆動される4輪型の車両における旋回動作時のヨーレイトを求めるに際し、前記車両の旋回時における前記前輪および/または後輪を操舵角を検出すると共に、前記車両の走行速度を検出し、前記左右に対をなす前輪および後輪をそれぞれ前記車両の中心線上における前輪および後輪に置き換えた等価モデルにおける前記車両の操舵角を前記前輪および/または後輪の操舵角から求め、上記等価モデルにおける前記車両の操舵角から幾何学的に求められる前記車両の旋回半径Roと前記車両の走行速度Vとから前記車両の旋回速度γを推定する。
(もっと読む)
車両運動制御装置および車両運動制御方法
【課題】走行環境に拘わらず、車両の運動状態を安定させることにより、車両の操安性の向上を図る。
【解決手段】算出部10aは、車両の運動状態を表す状態方程式のシステム行列に基づいて、システム行列を構成する複数の要素a11〜a22のうちの少なくとも一つの要素を表す多項式に含まる、前輪のすべり角βfと後輪のすべり角βrとを変数とする非線形項を算出する。設定部10bは、算出された非線形項に基づいて、それぞれの車輪に対する駆動力配分比rまたは荷重配分比r'の目標値r*を設定する。
(もっと読む)
カー・トレイラー連結車を安定化する方法と装置
【課題】
カー・トレイラー連合体の振動の走行状況に最適に適用された減衰が達成される方法と装置を提供すること。
【解決手段】
この発明は、牽引車両とその牽引車両により移動されるトレイラーを包含し、牽引車両が横揺れ運動に関して監視され、牽引車両或いはカー・トレイラー連結車の現実の或いは期待された不安定な走行挙動の検出の際に走行安定化措置が行われるカー・トレイラー連結車を安定化する方法に関し、臨界或いは非臨界状態に関する横揺れ運動を求めて評価し、横揺れ運動の振幅に依存して牽引車両を加速する工程から成ることを特徴とする。 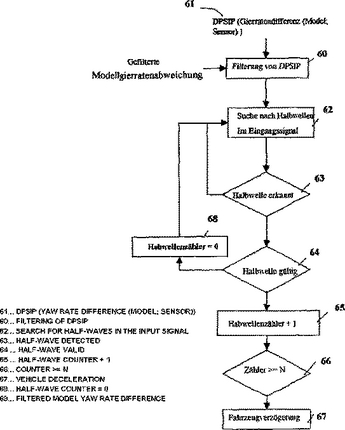 (もっと読む)
(もっと読む)
車輌の運動制御装置
【課題】操舵に対し遅れて発生する車輌のロールが低減されるよう左右輪間の制駆動力差を制御することにより、操舵に対し遅れて発生する車輌のロールのオーバーシュートや振動を低減し、運転者が異和感や不安感を感じる虞れを低減する。
【解決手段】左右前輪の実舵角δが演算され(S20)、車輌の実ロール角を操舵輪の舵角に基づく車輌の目標ロール角に追従させるために車輌に付与すべき左右輪の制駆動力差による目標ヨーモーメントMtが演算され(S30)、アクセル開度φ及びマスタシリンダ圧力Pmに基づき運転者による車輌全体の要求制駆動力Fが演算され(S40)、目標ヨーモーメントMt及び要求制駆動力Fに基づき各車輪の目標制駆動力Xiが演算され(S50)、各車輪の制駆動力が目標制駆動力Xiになるよう電動発電機12FL〜12RR若しくは摩擦制動装置16が制御される(S60)。
(もっと読む)
モーメント中心位置推算装置、その装置を備えた車両、及びモーメント中心位置推算方法
【課題】 車両の片揺れモーメントの中心位置を略リアルタイム的に推定することができ、走行状態における車両の姿勢制御精度を向上させることができる簡易な構造のモーメント中心位置推算装置、該装置を備えた車両、及びモーメント中心位置推算方法を提供する。
【解決手段】 複数の車輪と、車輪に加わる荷重に応じて緩衝部材の長さが変動する懸架装置とを備えた車両の片揺れモーメントの中心位置を推定するモーメント中心位置推算装置において、緩衝部材毎の長さの変動量を検知する検知手段と、検知した変動量に基づいて車輪毎に加わる荷重を推算する荷重推算手段と、推算した荷重に基づいて片揺れモーメントの中心位置を算出する中心位置算出手段とを備える。
(もっと読む)
プロセスをコントロールするための、特に走行安定性をコントロールするための方法
調整パラメータが、コントロール変数の実測値と規定値の比較から決定されるコントロール偏差に依存して構成される、プロセスをコントロールするための方法において、コントロール変数の実測値が、第1のプロセスモデルによって決定され、コントロールの必要(10)が、コントロールの要求(20,30,40)が別のプロセスモデルによって決定されるコントロール変数の値に基づいて決定されかつ論理演算によって互いに結合されることによって、付加的にチェックされる。 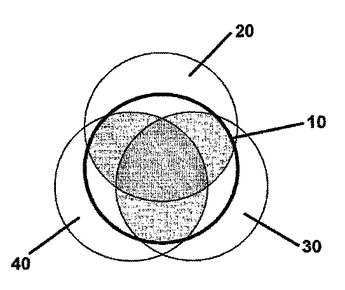 (もっと読む)
(もっと読む)
341 - 350 / 350
[ Back to top ]