
国際特許分類[B62D103/00]の内容
国際特許分類[B62D103/00]に分類される特許
101 - 110 / 371
車両制御装置
【課題】
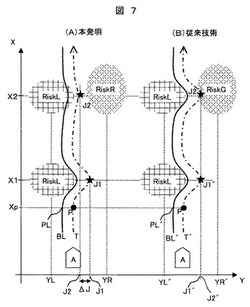
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車両走行支援装置

【課題】走行中の障害物を回避する際に、十分な安全性を確保すると共に、適切な走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】物体領域設定部17が、障害物検出部12及び二輪車判定部13により障害物として二輪車が検出された場合に、障害物の高さに基づいて物体領域Aを設定する。障害物が二輪車の場合は、転倒することによって必要とされる物体領域Aが増大する可能性があるが、障害物の高さに基づいて物体領域Aを設定することによって、転倒の可能性も考慮して安全性を確保することができる。また、障害物の高さに基づいて、転倒の可能性も考慮した必要最低限度の物体領域Aを設定することができるため、必要以上に広い物体領域Aを確保することを防止することができる。
(もっと読む)
車両用電動パワーステアリング装置
【課題】駆動力配分装置を備えた車両において安定した操舵フィールを得ることができる車両用電動パワーステアリング装置を提供する。
【解決手段】少なくとも操舵トルクに応じてアシストモータ31による操舵アシスト量を制御する車両用電動パワーステアリング装置1と、前後輪の駆動力配分を行う駆動力配分装置2とを備えた車両において、電動パワーステアリング装置1は、前輪駆動トルクまたは前輪への駆動力配分量が大きくなるにしたがって操舵アシスト量を低減するように補正する補正ゲイン算出部23を備える。
(もっと読む)
駆動力配分制御装置
【課題】障害物回避支援装置を備えた車両において回避性能を向上させることができる駆動力配分制御装置を提供する。
【解決手段】車両は、駆動力配分制御装置1と電動パワーステアリング装置2を備える。駆動力配分制御装置1は、前後輪の駆動力配分を行う前後輪駆動力配分制御部21と、後輪の左右輪の駆動力配分を異ならせることによりヨーモーメントを制御する後輪左右駆動力配分制御部22と、アクチュエータ制御部23と、制御ゲイン算出部24とを備える。電動パワーステアリング装置2は、車両前方の障害物を検知し該障害物との接触を回避する操作を支援する回避操作支援制御部42を備える。電動パワーステアリング装置2の回避操作支援制御部42が、障害物との接触を回避する操舵操作を支援する制御を行っているときには、後輪左右駆動力配分制御部22におけるヨーモーメント制御量のゲインを通常時よりも高める。
(もっと読む)
車両挙動制御装置
【課題】摩擦円の影響が小さい緩加速時やアクセルオフ等での不必要な車両制御を防止して、違和感無く自然で扱いやすい車両挙動を実現すると共に、各輪のグリップ状態を監視して、必要な運転領域では確実に、限界領域における車両挙動の安定性を確保する。
【解決手段】制御部50は、前後軸の接地荷重に基づく第1のステア特性量A1と摩擦円の限界を考慮した第2のステア特性量A2を演算し、A1≧A2の場合は、エンジントルク制御、及び、舵角制御を禁止する。また、A1<A2の場合は、第1のステア特性量A1と第2のステア特性量A2の差分を考慮した、エンジントルク制御、及び、舵角制御を実行する。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態の速やかな解消を補助できる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態にある場合には、前輪の車輪速度VWFを調整すべくアクセル操作を運転手が行うことを契機にグリップ力回復制御が実行される。すなわち、転舵輪である前輪は、その車輪速度VWFが運転手によって調整されつつ、その転舵角σの絶対値が一時的に小さくなるように調整される(第3タイミングt3)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第4タイミングt4)。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作状態との協調を図りながら、車両の安定走行のために車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1以下である場合、制動装置12の動作が優先的に補正された上で必要に応じて操舵装置11の動作が補足的に補正される。その一方、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1を超えている場合、操舵装置11の動作が優先的に補正された上で、必要に応じて制動装置12の動作が補足的に補正される。
(もっと読む)
運転支援装置
【課題】目標経路に沿って運転を支援する。
【解決手段】車両の運転を支援するための装置は、車両を目標位置に移動させるための目標経路に対する、車両の現在の位置の偏差が、該目標経路を中心とした所定範囲の幅内に収まるように、該車両のステアリングに荷重を加える。他の実施例では、車両を目標経路に沿って目標位置に移動させるための目標操舵角に対する、車両の現在の操舵角の偏差が、該目標操舵角を中心とした所定範囲の角度内に収まるように、該車両のステアリングに荷重を加える。これら所定範囲は、車両が目標位置に近づくに従って狭くなるよう設定される。こうして、目標位置に近づくにつれて徐々に幅が狭くなる“わだち”を走行しているような感覚を運転者に与える。
(もっと読む)
車両用走行支援装置および車両用走行支援方法
【課題】障害物との接触を回避する操舵制御を行う場合に、運転者に違和感が生じる事態を低減すること。
【解決手段】操舵回避能力が設定された閾値より低い場合に、障害物との接触回避のための操舵制御を抑制する(図10の区間B)。このため、操舵回避能力が設定閾値より低くなり、操舵制御による障害物との接触回避効果が低下した場合に、その操舵制御を抑制できる。この結果、操舵制御が行われている場合であっても、運転者が操舵操作を行った際、違和感を生じる事態を低減することができる。
(もっと読む)
車両の自動転舵装置
【課題】車両の状態を表すセルフアライニングトルク(SAT)によって自動転舵時の転舵角度又は転舵トルクを補正して、自動操舵によって車両が目標経路に沿って精度良く移動するよう制御可能な車両の自動転舵装置を提供する。
【解決手段】目標位置に至る目標経路に沿って車両を誘導する車両の自動転舵装置は、目標経路に応じた目標転舵角度を算出する目標転舵角度算出部61と、転舵角度を取得する転舵角度取得部と、目標転舵角度に基づいて、SAT目標値を算出するSAT目標値算出部62と、車両の実SATを取得する実SAT取得部64と、SAT目標値と実SATを比較した結果に応じて、車両の実際経路が目標経路と一致するよう目標転舵角度を補正する目標転舵角度補正部63とを備える。
(もっと読む)
101 - 110 / 371
[ Back to top ]