
国際特許分類[B62D103/00]の内容
国際特許分類[B62D103/00]に分類される特許
71 - 80 / 371
車両接地面摩擦状態推定装置及びその方法
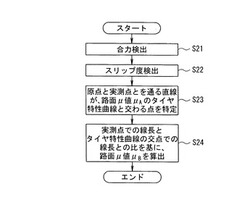
【課題】スリップが発生する前に走行路面の路面μを推定する。
【解決手段】車両接地面摩擦状態推定装置は、車輪の制駆動力及び横力からなる合力並びに車輪のスリップ度を検出し(ステップS21、ステップS22)、車輪の制駆動力、横力及びスリップ度を座標軸とする3次元空間における、該制動力、横力及びスリップ度が零である原点と検出した現在の制駆動力、現在の横力及び現在のスリップ度が示す実測値との間の距離と、原点及び実測値を含む直線がタイヤ特性相関関係マップと交じわる交点と該原点との間の距離との比を基に、現在の路面の路面摩擦係数を算出する(ステップS23、ステップS24)。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法

【課題】タイヤ特性の影響を受けないタイヤモデルに基づいて高い精度で路面μを推定する。
【解決手段】車両接地面摩擦状態推定装置は、基準タイヤにより基準路面摩擦係数の基準路面で得られる車輪のタイヤ力と車輪のスリップ度との相関関係で成立する特性線を表すタイヤ特性を想定してモデル化したタイヤ特性相関関係マップ45aを有する路面μ推定値演算部45と、検出したタイヤ力と検出したスリップ度との相関関係が直線関係となる領域における該タイヤ力と該スリップ度との比である線形域検出値比と、想定したタイヤ特性相関関係マップのタイヤ力とスリップ度との相関関係が直線関係となる領域における該タイヤ力と該スリップ度との線形域基準値比との比を補正係数とし、補正係数を基にタイヤ特性相関関係マップを補正する線形域Cp値推定部46及びマップ補正部47と、を備える。
(もっと読む)
車両用走行制御装置および車両用走行制御装置の制御方法
【課題】目標経路と自車両の位置との定常偏差を低減しつつ、操舵系に大きな制御力が発生して運転者に違和感を与えることを抑制可能とすること。
【解決手段】入力を積算しその積算結果に比例して操舵系への出力を設定する積分動作を行う制御系29によって、操舵系を制御するようにした。そして、目標経路と自車両の位置との偏差ΔYの絶対値|ΔY|が第1設定値未満である場合には、制御系29の積分動作において前記入力に代えて前記入力より小さい値を積算させるようにした。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が不安定な変動を生じたり、該推定値の精度が低下するのを防止しつつ、該摩擦係数の推定を行う。
【解決手段】路面反力の合力によって車両1に作用する比較対象外力の第1推定値Mnsp_estmを求める手段(S102〜S116,S122−2)と、比較対象外力に対応する慣性力を規定する車両1の運動状態量γdot,Accyの観測値から比較対象外力の第2推定値Mnsp_sensを求める手段(S122−1)と、摩擦係数μの変化に対する比較対象外力の感度pを算出するμ感度算出手段(S122−4)を備え、偏差(Mnsp_sens−Mnsp_estm)とμ感度pとに応じて路面摩擦係数の推定値μ_estmを更新する。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
ステアリング装置、及びステアリング制御方法
【課題】操舵制御を停止する際の誘導感を軽減する。
【解決手段】前方物体との接触を回避する必要が発生したときに、先ず前方物体との接触を操舵回避できれば(ステップS2の判定が“Yes”)、目標回避軌道を算出し(ステップS3)、その目標回避軌道を実現する操舵角となるように、電動モータ20を駆動制御する(ステップS4)。一方、操舵回避できなければ(ステップS2の判定が“No”)、操舵速度θ′に応じて目標操舵反力を算出し(ステップS5、S6)、この目標操舵反力を実現するトルクとなるように、電動モータ20を駆動制御する(ステップS7)。
(もっと読む)
車両の挙動支援装置及び車両の挙動支援方法
【課題】転舵輪の路面限界舵角をより精度よく導出できる車両の挙動支援装置及び車両の挙動支援方法を提供する。
【解決手段】ECUは、車両がアンダーステア状態になったと判定した場合(ステップS16が肯定判定)、アンダーステア状態になった時点の車両の車体速度VS及びステアリングホイールの操舵角θに基づき摩擦限界舵角σ_fを導出し(ステップS17)、その後、路面の悪路指数Nrwを演算する(ステップS18)。続いて、ECUは、路面の悪路指数Nrwが大きいほど大きくなるように補正角度Δσを設定する(ステップS19)。そして、ECUは、摩擦限界舵角σ_fと補正角度Δσとの和を路面限界舵角σmaxとし(ステップS22)、前輪の転舵角σの絶対値が路面限界舵角σmax以下となるように転舵角調整制御を行なう(ステップS23)。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時の乗り心地を改善することができる車両の後輪操舵制御装置を提供する。
【解決手段】 車体1と後輪3rl,3rrとの間に介装され、伸縮することによって後輪3rl,3rrのトー角を変更する電動アクチュエータ8を備えた車両の操舵制御装置6であって、車両Vが走行している路面の状態を推定する路面状態推定手段(路面状態推定部63)を有し、路面状態推定手段63によって悪路判定がなされた場合、アクチュエータ8を中立状態に維持することを特徴とする。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】車両制御コントローラ14が、回避経路の設定可能範囲の大きさに基づいて、回避制御に対する運転者の車両操作の寄与度を決定し、操舵角プロフィールと寄与度に応じてブレーキアクチュエータ12と操舵アクチュエータ13を制御することにより、回避経路に沿って車両1が走行し、且つ、運転者の車両操作が寄与度に応じた抑制度合いになるように操舵角,アクセル開度,及び制動液圧を制御する。これにより、回避経路の範囲の大きさ及び回避制御に対する運転者の回避操作の影響を考慮して回避制御が実行されるので、回避制御に対し運転者が感じる違和感を低減することができる。
(もっと読む)
車両走行支援装置及び車両走行支援方法
【課題】 必要に応じて予測した制御指令値を用いることにより高い精度で車両の運転操作を支援することができる車両走行支援装置等を提供する。
【解決手段】 第1制御指令値演算部22が所定の制御周期で第1制御指令値を演算し、将来状態予測部24が第1時刻における自車両運動状態及び障害物状態に基づいて第1時刻から所定時間後の第2時刻における自車両運動状態及び障害物状態を予測して、第2制御指令値演算部25が予測された第2時刻における自車両運動状態及び障害物状態に基づいて、第2時刻以降の第2制御指令値を演算する。予測適切度評価部23は、予測された自車両運動状態及び障害物状態と実際の自車両運動状態及び障害物状態とを比較して予測適切度を判定し、制御指令値出力処理部26は、予測適切度に基づいて第2時刻以降の実際の制御指令値として第1又は第2制御指令値を出力する。
(もっと読む)
71 - 80 / 371
[ Back to top ]