
国際特許分類[B62D103/00]の内容
国際特許分類[B62D103/00]に分類される特許
51 - 60 / 371
車両の舵角制御装置
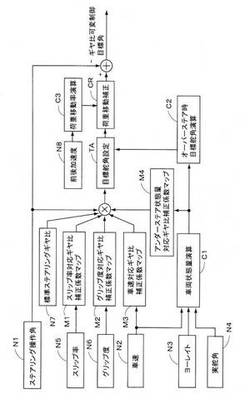
【課題】良好な走行安定性を確保し得る車両の操舵制御装置を提供する。
【解決手段】車両の運転者のステアリング操作に応じて操舵対象車輪の車輪舵角を制御する車両の操舵制御装置において、車両のアンダーステア傾向の強さを示すアンダーステア状態量の増大に応じてステアリングギヤ比を大きくするためのアンダーステア状態量対応ステアリングギヤ比補正係数を設定し、当該設定されたアンダーステア状態量対応ステアリングギヤ比補正係数によって所定の標準ステアリングギヤ比を補正し、当該補正後のステアリングギヤ比とステアリング操作角とに基づいて操舵対象車輪の車輪舵角を演算し、操舵対象車輪の車輪舵角を検出し、上記演算された車輪舵角と上記検出された車輪舵角とが一致するように車輪舵角を制御する。
(もっと読む)
車両のトー角制御装置

【課題】 車両のトー角制御装置において、アクチュエータの機械的なガタの範囲内における制御が過剰となることを防止する。
【解決手段】 自動車100の各車輪3のトー角を個別に変化させる電動アクチュエータ8と、自動車100の操舵角、車速、ヨーレイト等を検出する各種センサ10〜17とを有し、操舵角、車速、ヨーレイトに基づいて電動アクチュエータ8の目標制御量を設定し、目標制御量に基づいて電動アクチュエータ8を駆動制御するトー角制御装置6であって、自動車100が走行する路面上の障害物と車輪3とが接触することによって電動アクチュエータ8に負荷が加わることと予測されるときに、目標制御量を低減させるべく補正係数を設定する補正係数設定部53と、補正係数に応じて目標制御量を低減させるべく制御ゲインを低減させる制御ゲイン設定部54とを有することを特徴とする。
(もっと読む)
車両挙動センサの中点学習方法と車両挙動検出システム
【課題】車両挙動センサの温度変化の影響を回避して車両挙動センサの中点学習ができる車両挙動センサの中点学習方法と車両挙動検出システムを提供する。
【解決手段】VSA_ECUは、エンジンルーム内に設置され、ヨーレートセンサSYと、ヨーレートセンサ温度TYを検出する温度センサSTYを有する。エンジン制御ECUから吸気温度を外気温度TAirとしてCAN通信50を介して取得する。中点学習条件成立判定部42は、中点学習条件を満たしていると判定した場合に、中点決定部43に中点学習許可の信号を出す。中点決定部43は、ヨーレートセンサ温度TYと外気温度TAirとの差が、予め決められた閾値未満のときは、ヨーレートセンサSYからの信号を中点値として取得して、学習中点記憶部44に出力して、記憶させる。ヨーレートセンサ温度TYと外気温度TAirとの差が、閾値以上の場合は、中点値として取得しない。
(もっと読む)
車両運動制御システム
【課題】ドライバーの違和感を低減して車両の適正な挙動を確保できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1では、車両10の操舵角に基づき推定された将来の横加速度と、将来の道路情報に基づき推定された将来の横加速度とのうち低い方の横加速度が選択される。また、この選択にて車両10の操舵角に基づき推定された将来の横加速度が選択された場合には、現在の車両状態に基づき推定された車両の将来の座標と将来の道路情報とが用いられて車両10が所定のコースから逸脱するか否かが判定される。そして、この判定にて肯定判定が行われた場合には、将来の道路情報に基づき推定された将来の横加速度が用いられて、目標ヨーレートが算出される。
(もっと読む)
車両用衝突回避装置
【課題】 自車および物体の予測される衝突の態様に応じて的確な回避制御を行う。
【解決手段】 物体検知手段M1が他車を検知し、走行状態検出手段M2が自車の走行状態を検出すると、相対関係算出手段M3が自車に対する物体の相対関係を算出する。衝突可能性判定手段M4が前記相対関係に基づいて自車が他車に衝突する可能性を判定し、衝突可能性が高いと判定された場合には更に他車との衝突が予測される自車の衝突部位と、自車の移動方向および他車の移動方向が成す交差角と、自車が他車に衝突すると予測される衝突予測時刻とを算出する。衝突回避制御手段M5は、衝突予測時刻以前に前記衝突部位および前記交差角に基づいて自車の姿勢を変化させて衝突を回避するので、自車の他車に対する衝突を効果的に回避することができる。
(もっと読む)
旋回制御装置及び旋回制御方法
【課題】旋回時に車輪にキャンバ角が付与されたときに、運転者が操舵装置の操作に違和感を覚えることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバ角を付与するためのアクチュエータと、操舵装置と、操舵装置が操作されたときに、アシストトルクを発生させて操舵を補助する操舵補助装置と、アクチュエータを駆動して車輪にキャンバ角を付与するキャンバ制御処理手段と、車輪にキャンバ角が付与されたときに、アシストトルクを調整するアシストトルク調整処理手段とを有する。車両の旋回時に、車輪にキャンバ角が付与されると、アシストトルクが調整されるので、操舵装置の操作が重くなったり、軽くなったりすることがない。
(もっと読む)
4輪操舵車両
【課題】後輪操舵によって運転性能を高めつつ、後輪操舵を行った際に生じる運転フィールの違和感を低減する。
【解決手段】後輪トー角操舵トルク値設定部32は、操舵トルクTに基づいて、ヨーレイト規範値を設定するヨーレイト規範値設定部、横加速度規範値を設定する横加速度規範値設定部および、ロールレイト規範値を設定するロールレイト規範値設定部と、これら各規範値に基づいてそれぞれ後輪トー角ヨーレイト値を設定する後輪トー角ヨーレイト値設定部、後輪トー角横加速度値を設定する後輪トー角ヨーレイト値設定部および、後輪トー角ロールレイト値を設定する後輪トー角ロールレイト値設定部とを備え、目標後輪トー角設定部33が後輪トー角ロールレイト値を含ませて目標後輪トー角を設定する。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が実際の摩擦係数から乖離する方向に更新してしまうような状況が発生するのを防止し、該摩擦係数の推定を精度よく安定に行う。
【解決手段】比較対象外力の第1推定値Mnsp_estmを求める手段(S118−2)と、第2推定値Mnsp_sensを求める手段(S118−1)と、第1推定値Mnsp_estm及び第2推定値Mnsp_sensを基に摩擦係数推定値の増減操作量Δμ_kをそれぞれ決定する複数の増減操作量決定手段とを有し、Δμ_kに応じて摩擦係数推定値を更新する。増減操作量決定手段は第1推定値と第2推定値とのフィルタリング値の偏差に応じてΔμ_1,Δμ_2を決定し、増減操作量決定手段は第1推定値と第2推定値との偏差に応じてΔμ_1を決定する。
(もっと読む)
車両の後輪トー角制御装置
【課題】舵角センサ等のセンサが失陥した場合の後輪トー角制御装置のフェールセーフアクションが、車両挙動を乱すことも、運転者に違和感を与えることもなく適切に行われるようにすること。
【解決手段】車両が旋回している状態では、後輪トー角を中立に戻すフェールセーフアクションを行わず、車両が直進走行している場合に限って後輪トー角を中立に戻すフェールセーフアクションを行う。
(もっと読む)
車両挙動制御装置
【課題】 運転者が低μ路走行時等に過剰な操舵を行った場合においても、比較的簡単な構成および処理によって旋回能力の低下を効果的に抑制できる車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS22で操舵角絶対値|δr|を求めた後、ステップS23で現在の車速Vに基づいて車速−制限操舵角マップから制限操舵角δltを検索/設定する。次に、ATTS−ECU16は、ステップS24で操舵角絶対値|δr|が制限操舵角δltより大きいか否かを判定し、この判定がNoであれば、ステップS25で操舵方向Dsを操舵角絶対値|δr|に乗じることによって補正操舵角δcrを設定する。また、ATTS−ECU16は、ステップS24の判定がYesであれば、ステップS26で操舵方向Dsを制限操舵角δltに乗じることによって補正操舵角δcrを設定する。
(もっと読む)
51 - 60 / 371
[ Back to top ]