
国際特許分類[B62D61/12]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 車輪の配列または数に特徴のある自動車または付随車であって,他に分類されないもの,例.4つの車輪を菱形に配列したもの (113) | 数を変更自在の接地車輪を持つもの,例.他の車輪より高所に配設された数個の車輪を持つもの,または出没自在の車輪を持つもの (32)
国際特許分類[B62D61/12]に分類される特許
1 - 10 / 32
遠隔操作方式搬送車両
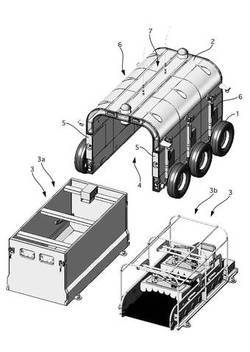
【課題】 荷役ユニットを取り替え可能とし、災害現場等において多様な荷役を可能とした遠隔操作による遠隔操作方式搬送車両の提供。
【解決手段】 動力駆動装置を備えた車両と、その車両に着脱される荷役ユニット3を備えた遠隔操作方式搬送車両であって、車両には荷役ユニット3の格納スペース4が備えられ、荷役ユニット3を単位として取り替えて搬送可能とした。
(もっと読む)
トレーラの車軸昇降装置

【課題】トレーラの軸数に拘わらず既存の測定台により連結車両の車両総重量の測定作業を容易に行え、且つ走行時の安全を確保することにある。
【解決手段】昇降式の走行車軸を接地位置と退避位置とに駆動するアクチュエータ48と空気圧タンク54とを接続する空気圧回路55に電磁弁56を設けるとともに、昇降式の走行車軸を支持するサスペンションに設けられた空気ばね44と空気タンク54とを接続する空気圧回路57に電磁弁58を設ける。各電磁弁56,58は電気回路63を開閉する操作スイッチ62により切り換えられ、昇降式の走行車軸の駆動が操作される。また、駐車ブレーキセンサ69からの信号により電気回路63を開閉するリレー66を設け、駐車ブレーキセンサ69によりトレーラの車両停止状態が未検出のときには、昇降式の走行車軸の退避位置への駆動を遮断して昇降式の走行車軸を接地位置とする。
(もっと読む)
トレーラの車軸昇降装置
【課題】昇降式のトレーラ車軸を備えたトレーラをトラクタにより牽引する際における運転者の操作性を向上させる。
【解決手段】車輪が路面に接地する接地位置と路面から離反する退避位置との間で昇降自在となった昇降式のトレーラ車軸がトレーラ12に設けられている。トレーラ12には、アクチュエータ48が設けられており、アクチュエータ48は流体圧により進退移動して前記昇降式のトレーラ車軸を接地位置と退避位置とに駆動するプッシュロッド49を有している。アクチュエータ48に対して流体圧源から供給される流体の圧力を圧力センサ55により検出し、この信号に応じてランプ56には、トレーラ車軸の昇降状態が表示される。
(もっと読む)
自走台車
【課題】低出力のアクチュエータであっても相対的に大きな段差を乗り越えることができるようにした、自走台車を提供する。
【解決手段】自走台車本体と、自走台車本体に設けられ回転動力を発生するアクチュエータと、アクチュエータと動力伝達可能に設けられるとともに自走台車本体を支持する主駆動輪と、主駆動輪と互いの軸方向が平行となるとともに、主駆動輪よりも接地部が上方に位置するように配設された補助駆動輪と、主駆動輪と補助駆動輪とを動力伝達可能に連結する伝達機構と、をそなえて構成する。
(もっと読む)
二輪自動車
【課題】 加減速時の応答性を向上させることができる二輪自動車を提供する。
【解決手段】 二輪自動車1は、車体2と、この車体2の左右両側に同軸上に配置された車輪3A,3B(車輪3Bは不図示)とを備え、車両重心Gが車輪3A,3Bの中心Sよりも下方に位置している。車体2には、車輪3A,3Bをそれぞれ回転駆動させる2つの駆動モータと、通常時には路面Rに接地されない前補助輪8及び後補助輪10と、この前補助輪8及び後補助輪10を上下方向に移動させる補助輪接地モータ11,12とが設けられている。また、二輪自動車1は、アクセル開度センサの検出値に基づいて、急加速時には後補助輪10を下方に移動させて路面Rに接地させるように補助輪接地モータ12を制御し、急減速時には前補助輪8を下方に移動させて路面Rに接地させるように補助輪接地モータ11を制御するECUを有している。
(もっと読む)
地形克服用補助車輪が内蔵された小型モバイルロボット
本発明は、2つの車輪により姿勢を維持しながら前後左右に動きが自在な小型モバイルロボットとして、内部に補助車輪を設けて地形的段差を克服できるように構成した小型モバイルロボットシステムである。本発明の小型モバイルロボットに設けられる補助車輪は、サーボモータに取付けられ、遠隔操作でサーボモータを駆動することで車輪が必要とする位置に移動されることにより、普段の走行中はロボットの内部に内蔵されており、段差地形が現れると補助車輪は地面と接触されるように降ろされて、主車輪が高い地形を登る時後方で支える支持台として働くことになる。また、本発明の小型モバイルロボットは、障害物を感知するためのセンサーと制御モジュールにより目標地点まで障害物を避けながら移動可能であり、移動中ロボットと間の無線通信により位置を把握できる機能と、カメラによる環境情報を伝達する機能を含む。本発明の小型モバイルロボットは、補助車輪を取付けた形態で少し変化を加えることで、段差地形においてもスムーズに移動することができ、簡単な構造により製造コストを大幅に削減できる利点がある。 (もっと読む)
車輪型走行装置
【課題】 段差登りに適した構成の車輪型走行装置を提供する。
【解決手段】車輪型走行装置の本体部に前可動脚と後可動脚が回動自在に取り付けられている。各可動脚の先端部分に脚車輪が取り付けられ、前脚車輪と後脚車輪は本体部を走行駆動する。また、本体部に取り付けられた前中間車輪と後中間車輪は、本体部を走行駆動する。駆動制御部は、脚車輪と中間車輪を駆動制御する車輪駆動部と、可動脚を駆動制御する脚駆動部と、進行方向の登り段差を検出するためのデータを得る段差検出部と、を含んでいる。駆動制御部は、段差検出部のデータに基づいて検出された段差を可動脚によって登る時に、脚駆動部により前可動脚と後可動脚を同期して徐々におろし動作させて本体部を前脚車輪と後脚車輪によって支持する姿勢に変化させると同時に、後可動脚または前可動脚のおろし動作に応じて車輪駆動部により後脚車輪の走行を加速させる。
(もっと読む)
セミクローラ型作業用車両
【課題】セミクローラ型作業用車両において、左右後車軸への左右クローラ走行装置の取り付け取り外しを容易にすることを課題とする。
【解決手段】クローラ持ち上げ支持装置を、前後及び上方が開放している正面視凹状の持ち上げ支持体と、持ち上げ支持体の下部に取り付けている左右キャスタと、持ち上げ支持体の上部左右両側から中央部に向けて延出している左右一側の固定支持軸、及び、左右他側の左右方向に移動調節自在の移動支持軸と、固定支持軸及び移動支持軸の内側端部に設けている固定支持手段とで構成する。そして、前後一対のクローラ持ち上げ支持装置における固定支持軸及び移動支持軸の内側端部に設けた固定支持手段により、クローラ走行装置下部の前側誘導輪、後側誘導輪の左右両側部を左右両側から挟持して回動不能に固定支持する。
(もっと読む)
移動ロボット及びその移動方法
【課題】車輪による移動時の走行性及び衝撃吸収性の向上を実現し、脚による歩行時の脚先位置決め精度の向上をも実現する移動ロボット及びその移動方法を提供する。
【解決手段】多関節脚車輪10は、固定可能に回動する第一関節駆動軸12を介して車体2に支持された回動脚部11と、固定可能に回転する駆動輪13が両端部分20aに配置され且つ中央部分20bが回動脚部11に固定可能に回動する第二関節駆動軸15を介して支持される旋回脚部20を備え、第一,第二関節駆動軸12,15を固定する走行段階で車体2に対する回動脚部11の回動及び第二関節駆動軸15に対する旋回脚部20の回動を許す衝撃吸収モードと、第一,第二関節駆動軸12,15を回動させての歩行段階で第一関節駆動軸12に対する回動脚部11の固定及び第二関節駆動軸15に対する旋回脚部20の固定を行う固定モードとを切り替え可能なサスペンション機構を設けた。
(もっと読む)
走行車
【課題】センサ系を複雑なものとすることなく、水溜りを含む環境における無人走破性を向上させることができ、車体の破損等も防ぐことが可能な走行車を提供する。
【解決手段】車体2と、車輪4と、進行方向の路面状態を計測する非接触型センサ3を備え、水の存在が推測される不確定水溜り部位Mを捉えた段階で、車体2を減速させて不確定水溜り部位Mまで微速前進させる制御部5と、車体2の前部車輪4が不確定水溜り部位Mに進入した段階で、車体2の底部分がエッジ部分Maに接地したか否かを検出する接触センサ6と、エッジ部分Maに車体2の底部分が接地した段階で、制御部5からの指令により車体2を不確定水溜り部位Mから脱出させる脱出機構10と、車体2の前部車輪4が不確定水溜り部位4に水没した段階で、不確定水溜り部位Mにおける水分の存在を検出して、制御部5に車体2の不確定水溜り部位Mからの後退を促す水検出センサ7を備えた。
(もっと読む)
1 - 10 / 32
[ Back to top ]