
国際特許分類[B64B1/00]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 軽航空機 (98) | 軽航空機 (98)
国際特許分類[B64B1/00]の下位に属する分類
軟式飛行船 (2)
硬式飛行船;半硬式飛行船 (16)
気球 (33)
気嚢の設備または構造;気体充填装置 (28)
係留用付属装置 (4)
水面浮上装置
バラスト調整装置 (1)
国際特許分類[B64B1/00]に分類される特許
1 - 10 / 14
発電装置、発電システム及び発電方法
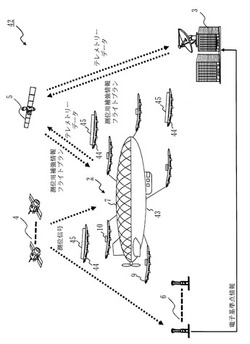
【課題】太陽電池を用いて多くの電力を得ることを目的とする。
【解決手段】光エネルギーを電力に変換する太陽電池7が気嚢に搭載された飛行船43と、太陽電池7で変換された電力を蓄えるバッテリー10を有する複数の無人プレーン9とが編隊飛行する。ある無人プレーン9のバッテリー10が充電されると、その無人プレーン9は編隊飛行から離れ降下してバッテリー10を交換しに向かい、残りの無人プレーン9は編隊飛行を継続する。
(もっと読む)
軌道追従制御装置、方法及びプログラム

【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
滑走路の状態監視
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】安全性を高めるために想定される流速よりも速い流速の下で、第一状態遷移確率を計算する。第一状態遷移確率及び所定の第一報酬を用いて、マルコフ決定過程における動的計画法に基づき、状態価値関数Vπ(s)を求める。想定される流速の下で、第二状態遷移確率を計算する。第二報酬を、遷移先の状態についての第一指標に応じて定める。第二状態遷移確率及び第二報酬を用いて、マルコフ決定過程における動的計画法に基づき、行動価値関数Qπ(s,a)及び状態価値関数Vπ(s)を求める。行動価値関数Qπ(s,a)及び状態価値関数Vπ(s)を最大にする行動aを選択する。
(もっと読む)
防空システム
【課題】防衛上の弱点を簡易に克服することの可能な防空システムを提供すること。
【解決手段】電波の送信装置6とエコーを受信する受信装置7とを別個に配置し、いずれも目標情報ネットワークシステム1に接続することにより防空システムを形成する。そして、送信装置6にデコイとしての役割を併せ持たせるようにすることで、ARMのような電波追尾型の脅威に対しても対応可能とする。
(もっと読む)
気球飛行機
【課題】 飛行での大量輸送はむづかしい。
【解決手段】 気球効果を利用することで、飛行での大量輸送が可能である。
(もっと読む)
上空の冷気を下降させる装置
【課題】台風や竜巻が発生し通過する場所で上空の冷気を降下させ、台風や竜巻を防ぐのが本発明の課題である。
【解決手段】上空の冷気を円筒とフアンによって下へ放出する。
他の例として、ヘリコプタを縦に多数配置し下降気流を発生させる。
これにより台風や竜巻が弱くなったり発生しなくなったりする。
(もっと読む)
空気より軽量のビークル用の減量フレキシブル積層材料
【課題】 良好な強度を有すると共に、軽量である、空気より軽量のビークルのハル用積層材料を提供する。
【解決手段】 本発明の積層材料は、少なくとも1のモノフィラメントヤーン層;前記少なくとも1のモノフィラメントヤーン層に近接し、任意に、補強用繊維又は補強用フィラーを含有する高弾性率フィルム層;及び前記高弾性率バリヤーフィルム層に近接するメタル化コーティングを包含する。
(もっと読む)
飛行船型空中クレーン
【課題】山岳地帯での樹木の集材を初めとする広範囲の分野で、安価で安全に、且つ簡単な操作で貨物の搬送を行うことができるようにした飛行船型空中クレーンを提供する。
【解決手段】浮揚ガスを充填した機体1と、機体1の左右において各々前後に設けた推進機2〜5と、機体1の両側において機体の浮心と同一垂線上で浮心と水平位置が同位置になる各支点に回動自在に設けた吊り下げ具8とを備え、前記各推進機は、駆動軸から放射状に延びる駆動腕の端部に回動自在に支持した複数の回転翼と、複数の回転翼の傾斜を相互に関連して調節可能にする回転翼傾斜調節部材とを有する。この回転翼傾斜調節部材は、任意に移動可能に設けた1つのスリップリングと、スリップリングを中心に回動する支持板と、各回転翼と前記支持板とを両端部で回動自在に各々連結する制御腕とからなり、スリップリングの移動により複数の回転翼の傾斜を任意に調節して、機体を操縦可能とする。
(もっと読む)
自律移動ロボットの動作計画方法、自律移動ロボットの動作計画方法を利用した自律移動ロボットの制御方法、自律移動ロボットの動作計画装置、自律移動ロボットの動作計画プログラム及びその記録媒体、自律移動ロボットの制御プログラム
【課題】自律移動ロボットの加速度制限値と3次元障害物への対応とを考慮した自律移動ロボットの動作計画技術を提供する。
【解決手段】目標速度計算部102が、自律移動ロボットの加速度制限値を考慮した式により、目標速度を計算する。変位量計算部104が、その目標速度と、想定される風速(103)から、位置と方位角と旋回速度のそれぞれの変位量を計算する。状態遷移確率計算部105が、その変位量から状態遷移確率を計算する。一方、傾斜角差計算部107が、地形モデル(106)を参照して、遷移前の状態とある行動を取った際の遷移先の状態の傾斜角差を計算する。登坂角度計算部108が、自律移動ロボットの登坂角度変化最大量を計算する。報酬決定部109が、上記傾斜角と上記登坂角度変化最大量を比較し、上記傾斜角の方が大きければ、低い報酬を与える。
(もっと読む)
1 - 10 / 14
[ Back to top ]