
国際特許分類[B64C13/00]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 飛行機;ヘリコプタ (2,562) | 飛行操縦翼面,揚力増加フラップ,空気制動装置,またはスポイラを作動するための操縦系統または伝達系統 (300)
国際特許分類[B64C13/00]の下位に属する分類
国際特許分類[B64C13/00]に分類される特許
1 - 10 / 30
無人飛翔体の耐障害性飛行制御システムおよび方法
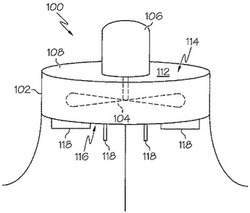
【課題】複数の独立制御可能な制御ベーンを備える無人飛翔体(UAV)を制御するための方法および装置を提供すること。
【解決手段】制御ベーンのそれぞれを、命令された操作をUAVに行わせる位置に移動する制御ベーン位置コマンドが供給される。制御ベーンの1つが動作不可能であることが感知され、動作不可能な制御ベーンの位置が決定される。動作不可能な制御ベーンの決定された位置に基づき、命令された操作をUAVにさらに行わせる新しい制御ベーン位置コマンドが決定される。
(もっと読む)
航空機制御装置及び航空機制御システム

【課題】航空機制御装置において、航空機に設置された機器の動作を安全に継続可能な冗長性を確保し、演算処理部の台数を低減し、構成を簡素化する。
【解決手段】複数の制御チャンネル13のそれぞれは、電源14と、操作信号を受信するインターフェース16と、操作信号に基づいてアクチュエータの動作指令信号を演算して生成する演算処理部17と、最終的にアクチュエータの動作を制御する制御信号を決定して出力する信号決定部18と、を有する。複数の制御チャンネル13にそれぞれ設けられた演算処理部17は、互いに設計が異なる。信号決定部18は、その信号決定部18が設けられた制御チャンネル13の演算処理部17で生成された第1動作指令信号と、他の制御チャンネル13の演算処理部17で生成された第2動作指令信号とを受信し、第1動作指令信号と第2動作指令信号とを比較することで、制御信号を決定して出力する。
(もっと読む)
制御システム
【課題】 コストを抑えることのできる制御システムを提供する。
【解決手段】 モニタ信号を出力する第一センサ4aと、モニタ信号を出力する第二センサ14aと、制御信号が入力される第一駆動機構4bと、制御信号が入力される第二駆動機構14bと、第一駆動機構4bに制御信号を出力する第一CPU1と、第二駆動機構14bに制御信号を出力する第二CPU11とを備える制御システム30であって、第一CPU1には、第二CPU11から第二駆動機構に出力した制御信号が入力されるとともに、第二センサ14aからモニタ信号が入力され、第一CPU1は、第二CPU11が正常であるか否かを判定し、第二CPU11には、第一CPU1から第一駆動機構14bに出力した制御信号が入力されるとともに、第一センサ4aからモニタ信号が入力され、第二CPU11は、第一CPU1が正常であるか否かを判定するようにする。
(もっと読む)
航空機の制御システム、航空機、航空機の制御プログラム、及び航空機の制御方法
【課題】舵面の舵角を制御することによって飛行を制御する制御則から、舵面の舵角及びエンジン推力を制御することによって飛行を制御する制御則への切り替えを適切に行うことを目的とする。
【解決手段】航空機1の制御システム6は、舵面3の舵角を制御することによって飛行を制御する飛行制御則20、舵面3の舵角及びエンジン推力を制御することによって飛行を制御する舵面・推力統合飛行制御則22の何れかで飛行を制御するコンピュータ15と、舵面3の少なくとも1つが機能不良であることを検出する舵面故障損傷検出装置18を備え、舵面3の機能不良が検出された場合に、該検出結果に基づいて、所望の飛行特性を実現するために要する舵面3の舵角及び舵角の変化率を算出し、算出した舵角又は舵角の変化率が変化可能な範囲を超えているか否かを判定することによって、飛行制御則20から舵面・推力統合飛行制御則22への切り替えの要否を判定する。
(もっと読む)
電子機器のヘルスモニタリング装置
【課題】動作機器に対する制御信号を出力する電子機器の健全性を監視でき、制御部及びモニタ部を備えてジェネリック故障を監視することができるとともに、制御部及びモニタ部の劣化度まで検知できる、電子機器のヘルスモニタリング装置を提供する。
【解決手段】記憶部(24、27)は、制御部23への入出力電気信号の第1基準値とモニタ部26への入出力電気信号の第2基準値とを記憶する。第1注意信号出力部25は、制御部23への入出力電気信号と第1基準値との乖離量が閾値を超えた場合に、制御部23の劣化を検知して注意信号を出力する。第2注意信号出力部28は、モニタ部26への入出力電気信号と第2基準値との乖離量が閾値を超えた場合に、モニタ部26の劣化を検知して注意信号を出力する。第1及び第2基準値は、制御部23及びモニタ部26の製造完了から運用開始までの間に取得されて記憶部(24、27)に記憶される。
(もっと読む)
最適テイクオフおよび着陸構成のための可変キャンバに関する翼の調整
【課題】テイクオフ中および着陸中に従来のシステムを超える改善された効率を提供するために単一のドライブリンクを利用してフラップ面移動の差動制御を提供する方法およびシステムを提供する。
【解決手段】航空機の翼上の後縁高揚力装置を移動するシステムおよび方法を対象とし、より具体的には、航空機の離陸中および着陸中によりよい揚力/抗力特性をもたらすためにインボードフラップ312、アウトボードフラップ313、およびミッドスパンフラップ316を差動的に移動することを対象とする。
(もっと読む)
アクチュエータ制御システム
【課題】ジェネリック故障を監視できるとともに、ジェネリック故障発生時にアクチュエータの動作の開始から終了までに亘る全ての動作を制御可能な冗長化を図れ、構成の更なる簡素化及び合理化を図ることができるアクチュエータ制御システムを提供する。
【解決手段】動作制御装置11は、舵面100の動作の指令信号を生成する指令生成部21と、アクチュエータ制御装置12の第1及び第2制御部(25、26)の夫々の作動の異常を夫々監視する第1及び第2モニタ部(22、23)と、を有する。アクチュエータ制御装置12は、舵面100を駆動するアクチュエータ101の制御信号を生成するとともに設計の異なる第1及び第2制御部(25、26)と、第1及び第2モニタ部(22、23)での異常検知時に第1及び第2制御部(25、26)の一方から他方へアクチュエータ101に対する接続状態を切り替える切替手段(29、36)と、を有する。
(もっと読む)
空力係数推定装置及びこれを用いた舵面故障・損傷検出装置
【課題】信頼性の高い空力係数推定値を演算することを可能とすると共に、この空力係数推定値を演算することにより搭乗者への負担を軽減しつつ正確に舵面の故障・損傷を検出可能とする。
【解決手段】機体の空力特性を示す空力係数を推定するための舵角指令信号を生成する舵角指令信号生成手段5と、舵角指令信号に基づいて機体に設けられた舵面が駆動したことに起因する機体の運動状態量を取得する運動状態量取得手段6と、運動状態量から、異なる2つ以上の推定手法を用いて夫々前記空力係数を推定するための候補値を算出する候補値算出手段7と、各候補値に基づいて、空力係数推定値を決定する空力係数推定値決定手段8とを備える。
(もっと読む)
航空機の制御システム、航空機の制御方法、及び航空機
【課題】舵面の一部又は全てが機能不良となった場合においても、操縦者による複雑なスロットル操作を必要とせずに、安定した飛行を可能とする。
【解決手段】機体の状態情報及び操作端からの操作指令信号に基づいて、エンジン推力を制御するための推力指令制御信号及び舵面を制御するための舵角指令制御信号を算出する演算手段15と、前記推力指令制御信号に基づいてエンジンを駆動するエンジン駆動手段17と、前記舵角指令制御信号に基づいて各舵面を駆動する舵面駆動手段16とを備える。
(もっと読む)
飛行制御システム
【課題】異常時に迅速なバックアップ動作が可能な飛行制御システムを提供する。
【解決手段】本発明の飛行制御システムは、パイロットによる操縦桿その他の操作に基づいてパイロット操舵信号を生成するPCS1と、飛行機の各操舵翼5等を制御するFCC2と、FCC2から出力される操舵翼操舵信号に基づいて各操舵翼5を制御するために操舵翼5ごとに設置される操舵翼制御装置4と、FCC2と操舵翼制御装置4とをつなぐデータバス3とから構成され、操舵翼制御装置4には、操舵翼操舵信号に基づいてサーボ演算処理を実行しアクチュエータ操作信号を出力するACE6と、アクチュエータ操作信号に基づいて油圧シリンダ72に供給される圧油を制御するアクチュエータ部7と、が含まれており、1つの操舵翼5は複数組のACE6とアクチュエータ部7とにより制御され、ACE6は常用制御部62、監視部63、バックアップ制御部64等を含む。
(もっと読む)
1 - 10 / 30
[ Back to top ]