
国際特許分類[B65G63/00]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 貯蔵場,操車場または港における移送または積み換え;操車場装置 (243)
国際特許分類[B65G63/00]の下位に属する分類
ブリッジ以外の実質的な水平移送路をもつもの (2)
コンベヤを備えたブリッジによる実質的に水平な移送路をもつもの
実質的に垂直な移送路をもつもの
国際特許分類[B65G63/00]に分類される特許
171 - 180 / 241
コンテナターミナルのゲートシステム

【課題】コンテナターミナルの入口ゲートのノンストップ化を実現するため、コンテナの搬出を要請された場合に、コンテナターミナルに来構するヘッドやシャシを入口ゲートで確実に識別できて荷役作業を円滑に行えるコンテナターミナルのゲートシステムを提供する。
【解決手段】海貨業者等がコンテナを搬出すべき荷役作業をインターネット1を介してデータベース6に登録し、入手した予約番号と荷役作業内容を陸運業者に連絡して陸送を委託する。陸運業者は運転者を手配し、作業内容を指示し予約番号を通知する。運転者は携帯電話機9から前記ウェブサーバ3にアクセスして予約番号から受付情報にヘッド8やシャシ7を識別するためのプレート番号等を入力する。入口ゲート10ではヘッド8等を識別して、該当の荷役作業を指示する。
(もっと読む)
火力発電所の石炭サイロ及び貯蔵石炭の再循環制御システム

【課題】 火力発電所の石炭貯蔵において、自然発火を防止するため、石炭の温度上昇を防ぐことができる石炭サイロを提供する。
【解決手段】 石炭貯蔵エリアを隔壁により複数個の区画に分けた槽と、貯蔵エリアの上方に配置され、石炭を搬入する受入コンベア20と、槽の各々の上方に配置され、受入コンベアの石炭を槽内に搬入する積付機23と、槽の各々の下方に配置され、石炭を搬出する払出機24と、払出機24の石炭を搬出する払出コンベア22とを備え、払出機24は、比較的古い石炭を貯蔵する槽から順に石炭を払い出し、また、槽の上方に配置された積付機23によって石炭を搬入し、下方に配置された払出機24によって石炭を搬出することにより、貯蔵石炭の先入れ先出しを実行する。
(もっと読む)
原料ヤード移動機の自動払出方法
【課題】 原料ヤードの原料積付け山をリクレーマにより一定量で払出す自動払出し方法を提供する。
【解決手段】 原料ヤード移動機のバケットホイール駆動用電動機の無負荷電流値を基に、旋回反転位置を自動検出後自動払出しを行う方法において、無負荷電流値を一定とせず、1回の払出作業が終わる毎に無負荷電流を測定し、常に無負荷電流値を更新する機能を設けると共に、反転位置と判定するホイル電流値を、測定された無負荷電流値+αとし、αは常時設定できるようにし、反転角度域の中心を直前の反転角度に常に置き換えつつ、払出山の形状に沿った反転位置で旋回反転して自動払出する原料ヤード移動機の自動払出方法。
(もっと読む)
原料ヤード受入時の積山検出器およびその方法
【課題】原料ヤード受入時のスタッカーにおける積山検出器、およびその方法を提供する。
【解決手段】原料ヤード受入時の積山を検出するための積山検出器7において、積山検出器7に検出羽14を設置し、かつ、積山検出器7上部に重錘16を設置したことを特徴とする原料ヤード受入時の積山検出器7。また、積山検出器7の位置を、スカッターの機内ベルトコンベアの中心から積山検出器7までの距離Ls、積山間隔をLpとするとき、Ls≦Lp/2とすることを特徴とする原料ヤード受入時の積山検出方法。
(もっと読む)
コンテナターミナルゲートの管理装置
【課題】 コンテナターミナルに入構待ちのシャシの台数を極力少なくできるようにしたコンテナターミナルゲートの管理装置を提供する。
【解決手段】 コンテナターミナル1の入口のゲートGiにシャシ4を案内する入構用道路10の途中に、シャシ通過センサ12を設けて入構するシャシ4の通過台数を測定し、同じくシャシ重量計測装置13を設けて、シャシ4に積載されたコンテナ3の有無と積載されたコンテナ3が実入りコンテナ3aか空コンテナ3bかのシャシ種別を判別する。これら通過台数とシャシ種別とから、ゲートGiのうちの開放するゲートGi1〜Gi8のいずれを開放するかを決定して、シャシ4のゲートGiの通過の円滑化を図る。
(もっと読む)
コンテナターミナルの受付けシステム
【課題】 コンテナターミナルに出入りするすべてのトラックまたは運転者に対応させた数を用意する必要がなく、運転者がトラックの行き先を容易に認識できるようにする。
【解決手段】 受付けシステム10は、トラック32の運転者34にIDタグ24を携帯させる。IDタグ24は、表示部26を備えるとともに、コンテナターミナル12への入場に必要な利用者識別情報を書き替え可能に記憶し、無線通信が可能となっている。コンテナターミナル12管理センタ20には、利用者識別情報と対応してトラック32の行き先情報を記憶しているシステムサーバ44が設置してある。コンテナターミナル12の入場チェック部40には、ゲート端末42が設けてある。ゲート端末42は、IDタグ24と通信してIDタグ24が記憶している利用者識別情報を読み出し、システムサーバ44からトラック32の行き先場所を受け取ってIDタグ24の表示部26に表示する。
(もっと読む)
シミュレーションプログラム、シミュレーション方法及びシミュレーション装置
【課題】 熟練者の知識を効率的に学習しながら、動的な環境変化に対して柔軟に対応するシミュレーション装置を提供する。
【解決手段】 制約条件設定部101は、複数の制約条件を必須制約条件と緩和制約条件とに設定し、シミュレーション部102は、設定された制約条件を用いて事例をシミュレーションし、シミュレーション結果表示部301は、シミュレーション結果を表示する。このとき、修正受付部404は、シミュレーション結果に対する熟練者の修正を受け付け、修正認識部106は、ユーザの修正を分析して修正箇所及び修正過程を認識し、制約条件再設定部108は、修正箇所及び修正過程に応じて必須制約条件及び緩和制約条件の設定を再設定し、シミュレーション部102は、再設定された制約条件を用いて事例を再シミュレーションする。
(もっと読む)
コンテナクレーンの対象物位置計測装置と該対象物位置計測装置を用いた自動荷役装置
【課題】スプレッダと吊り上げ目標コンテナ、吊り荷コンテナと積載目標物の位置を同時計測し、積み込み積み卸し時の位置決めを正確に行えるようにする。
【解決手段】トロリー8に巻上げロープ10を介して懸吊されたスプレッダ9にて保持されるコンテナ11の長手方向一端よりも外方位置となるように、トロリー8の横行方向と直角方向の一側に、レーザレーダ19を取付部材32を介して取り付ける。トロリー8に懸吊されたスプレッダ9、スプレッダ9に保持した吊り荷コンテナ11と、その下方に位置する、吊り上げ目標コンテナ11、又は、吊り荷コンテナ11の積載目標物を、レーザレーダ19により斜め上方より走査して3次元位置を同時計測し、その3次元位置情報を基に、スプレッダ9下面と吊り上げ目標コンテナ11の上面、又は、吊り荷コンテナ11下面と積載目標物の上面が一致するよう上記巻上げロープ10の長さとトロリー8の横行を制御させる。
(もっと読む)
コンテナを吊り上げ、取り扱い及び輸送する装置
トラックなどの輸送車両78のプラットフォームへ、及びそこからコンテナ34を吊り上げ、取り扱い、輸送するために、可動キャリア枠24が使用される。キャリア枠24を、縦列駐車空間などの窮屈な空間に入るようさらに簡単に操縦できるように、駆動輪62及びキャスタ輪62が配置される。キャリア枠は、遠隔制御装置によって遠隔操作することができる。キャリア枠の後端にある横要素は、特に係合位置にある場合に、キャリア枠に追加の構造的支持を提供するために使用することができる。 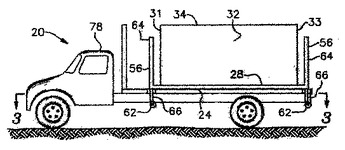 (もっと読む)
(もっと読む)
コンテナヤードにおける設備の配置構造
【課題】コンテナヤードで効率よく無人搬送台車を走行させることができるようにするコンテナヤードにおける設備の配置構造を提供する。
【解決手段】 構内シャシ7aと外来シャシ7bとの間でコンテナ5の受け渡しを行うために配されたバッファエリア21に、構内シャシ7aと外来シャシ7bの走行方向前側に搬入エリア21iを、後側に搬出エリア21oを配して、搬出エリア21oでコンテナ5を積み卸して空荷となった構内シャシ7aに、搬入エリア21iで搬入コンテナ5を積み込みようにして、空荷での走行距離を小さくする。また、蔵置エリアの適宜位置に逆方向軌道となる逆送レーン36を配して、コンテナ5を積み卸した構内シャシ7aが短時間で次に積み込むコンテナ5の蔵置位置まで走行できるようにする。
(もっと読む)
171 - 180 / 241
[ Back to top ]