
国際特許分類[G01B11/25]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 輪郭または曲率の測定用 (3,716) | 対象物にパターン,例.モアレ縞,を投影することによるもの (502)
国際特許分類[G01B11/25]に分類される特許
1 - 10 / 502
情報処理装置、情報処理装置の制御方法、およびプログラム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
情報処理装置、情報処理装置の制御方法、およびプログラム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
投影装置、3次元計測装置並びにその制御方法およびプログラム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
3次元形状データ取得装置の光学測定ヘッド
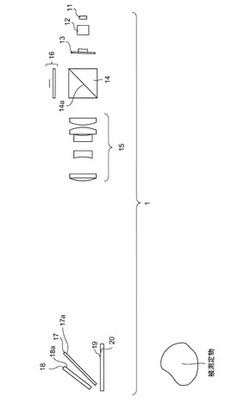
【課題】小型化の3次元形状データ取得装置の光学測定ヘッドを提供する。
【解決手段】投射光学系および撮像光学系は、プリズム型偏光ビームスプリッタ14と、ワイヤーグリッド偏光ビームスプリッタ17と、プリズム型偏光ビームスプリッタ14とワイヤーグリッド偏光ビームスプリッタ17との間に配置される結像光学系15とを有し、MEMS13と撮像手段16は、互いにプリズム型偏光ビームスプリッタ14の偏光分離面を挟み互いに交差する方向に配置され、ワイヤーグリッド偏光ビームスプリッタ17は、MEMS13から出射され結像光学系15を透過した光を透過し、ミラー18により被測定物表面に投射され被測定物表面で反射された光は、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面で結像光学系15に向けて反射させる構成とし、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面と、ミラー18の反射面とは互いに非平行とした。
(もっと読む)
部品実装装置および部品実装方法

【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
三次元計測装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、より高精度な計測を実現することのできる三次元計測装置を提供する。
【解決手段】基板検査装置1は、プリント基板2に対し縞状の光パターンを照射する照射装置4A,4Bと、これを撮像するカメラ5と、撮像された画像データを基に三次元計測を行う制御装置6とを備えている。制御装置6は、第1照射装置4Aから第1光パターンを照射して得られた画像データを基に第1計測値を取得し、第2照射装置4Bから第2光パターンを照射して得られた画像データを基に第2計測値を取得する。そして、両光パターンが照射される全照射領域に関しては、両計測値から特定される値を当該領域の高さデータとし、いずれか一方のみ照射される一部照射領域に関しては、前記全照射領域の高さデータから算出した補完データを基に当該領域に係る計測値の縞次数を特定し、当該領域に係る高さデータを取得する。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部の基準面部位の少なくとも3点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面部における光の輝度分布と基準輝度分布との位相差から、基準面部の所定の位置からの第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部113の基準面部位の少なくとも1点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面データおよび基準面部113の反射率と基準輝度値とを用いて、基準面部113の第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】特徴の認識性能を向上する。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
(もっと読む)
1 - 10 / 502
[ Back to top ]