
国際特許分類[G01B11/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129)
国際特許分類[G01B11/26]の下位に属する分類
軸の心合せ検査用 (33)
ホイールの心合せ試験用 (12)
国際特許分類[G01B11/26]に分類される特許
1,081 - 1,084 / 1,084
ロータリテーブルの回転角度較正方法
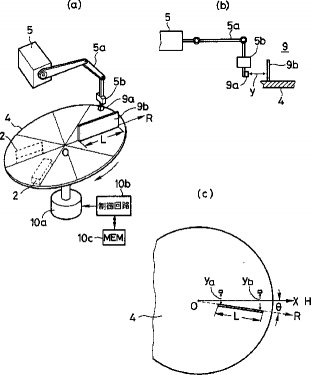
【目的】 ロータリテーブルによるワークの自動供給装置において、メモリに記憶されたテーブルの角度データを較正する。
【構成】 自動搬送機構に設けられたロボット機構5のハンドアーム5a に光学式の変位センサ9a を、また、テーブル4の半径ORの方向に回転角度の基準を示す基準反射板9b をそれぞれ設ける。ロータリテーブル4の中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサ9a をX方向に移動して基準反射板の両端のY座標値ya,yb をそれぞれ測定し、両Y座標値の差と両端間の長さLとによりX軸に対する基準反射板のズレ角度θを算出し、これをメモリ10c に与えて記憶された各角度データを較正する。
(もっと読む)
ロータリーエンコーダ
信号発生装置

【目的】 機械プレスのクランク軸の回転角度を検出するときなどに用いられる検出装置をフェイルセ−フな検出信号で検出できるようにする。
【構成】 被検出体の駆動に対応して移動する遮蔽手段と、その遮蔽手段の移動にともなって発射された光線が透過または遮蔽される位置関係を有して設けられ、その信号の透過時には2値化信号の「1」の出力ありを出力し、その信号の遮蔽時には2値化信号の「0」の出力なしを出力する透過型検出器と、前記遮蔽板との位置関係を前記透過型検出手段と同じくし、前記信号の透過時には2値化信号の「0」の出力なしを出力し、その信号の遮蔽時には2値化信号の「1」の出力ありを出力する反射型検出器とを有し、両検出器の双対信号によりフェイルセ−フな検出信号を得る。
(もっと読む)
用紙反転装置におけるドラムの位置検出装置
1,081 - 1,084 / 1,084
[ Back to top ]