
国際特許分類[G01B11/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129)
国際特許分類[G01B11/26]の下位に属する分類
軸の心合せ検査用 (33)
ホイールの心合せ試験用 (12)
国際特許分類[G01B11/26]に分類される特許
81 - 90 / 1,084
運転支援装置
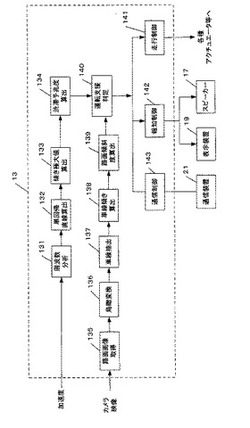
【課題】道路のスロープ特性と渋滞予兆とを考慮して燃費を向上させるための車両の運転支援装置の提供。
【解決手段】カメラから路面映像を受信する路面映像入力手段135と、路面映像を鳥瞰変換する鳥瞰変換手段136と、鳥瞰変換された路面映像から複数個の車線を抽出する車線抽出手段137と、抽出された複数個の車線の傾きを算出する傾斜度算出手段138と、複数個の車線の傾の差異値を利用して路面傾斜度を算出する路面傾斜度算出手段139と、自車両の加速度を検出する手段と、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段と、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133とを備える。運転支援装置は、路面傾斜度が所定値よりも大きく、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法

【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
形状測定装置
【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
入力装置、入力制御方法及びプログラム
【課題】 低消費電力でコストを掛けずに直感的な遠隔操作を行えるようにすることにある。
【解決手段】 入力装置(10)は、離隔位置にある所定立体形状のマーカ体(18、33、42)を画像認識する画像認識手段(8)と、前記画像認識手段の認識結果に基づいて前記マーカ体の姿勢を判定する姿勢判定手段(13)と、前記姿勢判定手段の判定結果に対応したイベントを発生するイベント発生手段(15)とを備える。マーカ体(18、33、42)の画像を認識し、その画像に基づいてマーカ体の姿勢を判定して遠隔操作用のイベントを発生する。リモコンに適用する場合は、リモコン本体にマーカ体を取り付ければよい。
(もっと読む)
3次元計測装置、および3次元計測方法
【課題】偏光解析を用いながら、複数の傾斜面の各傾斜方向の違いを識別できる3次元計測装置、および3次元計測方法を提供する。
【解決手段】3次元演算部4の傾斜算出部41は、ワーク台座6によってカメラ3の撮像方向とワークWの表面との相対角度を第1の状態に設定してカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第1の傾斜角および第1の方位角を求め、ワーク台座6によって相対角度を第1の状態から第2の状態に変化させた後にカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第2の傾斜角および第2の方位角を求め、傾斜補正部42は、第1の傾斜角と第2の傾斜角との差に基づいて、第1の傾斜角または第1の方位角を補正する。
(もっと読む)
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム
【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
偏芯回転センサならびに溶接トーチ揺動検出器および揺動装置
【課題】 電磁ノイズ等の外乱要因の影響を低減。電磁ノイズ等の外乱要因が大きく影響する作業環境下でも、誤動作なく溶接トーチを揺動駆動する。
【解決手段】 偏芯カム6を間にして相対向し該偏芯カムの周面に摺接する第1および第2のばね板2a,3a;各ばね板に固定されて各ばね板の偏芯カム回転対応の屈伸による張力に対応した波長の光を反射する第1および第2のFBG光ファイバ4a,5a;第1のFBG光ファイバ4aにレーザ光を送出し該FBG光ファイバ4aからの反射光を出力する第1の光カプラ8;および、第2のFBG光ファイバ5aにレーザ光を送出し該FBG光ファイバ5aからの反射光を出力する第2の光カプラ9);を備える。さらに、第1および第2の光カプラ8,9が出力する光相当の偏芯回転電気信号を発生する電気回路手段11〜13;を備える。
(もっと読む)
81 - 90 / 1,084
[ Back to top ]