
国際特許分類[G01B11/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129)
国際特許分類[G01B11/26]の下位に属する分類
軸の心合せ検査用 (33)
ホイールの心合せ試験用 (12)
国際特許分類[G01B11/26]に分類される特許
41 - 50 / 1,084
画像処理装置およびその制御方法
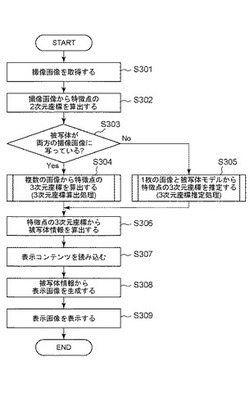
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
光検出装置

【課題】入射光の入射位置及び入射方向を同時に検出することができるようにした光検出装置を提供する。
【解決手段】第一の平面内にマトリックス状に配置した複数個の光検出素子から成る第一の光センサアレイ11と、第一の平面の光入射側と反対側にて所定間隔dで平行に隔置した第二の平面内にマトリックス状に配置した複数個の光検出素子から成る第二のセンサアレイ12と、スポット状の入射光による第一及び第二の光センサアレイ11、12からの検出信号に基づいて、当該入射光の第一及び第二の光センサアレイ11、12上における入射位置P1,P2を演算すると共に、演算した入射位置間の偏位量ΔPから当該入射光の入射角度θを演算して、当該入射光の入射位置及び入射方向を決定する信号処理部14と、を含むように、光検出装置10を構成する。
(もっと読む)
動きを検出するシステム、リソグラフィ装置、およびデバイス製造方法
【課題】誤差の影響を受けにくいが大きな空間を占有しない、改善された精密測定システムを提供する。
【解決手段】本体の動きを検出するシステムであって、本体と、基準フレームに対して実質的に静止して取り付けられた第1回折格子40,42と、本体に取り付けられた第2回折格子50,52と、第1および第2回折格子で回折された一つ以上の放射ビームを受け取り、基準フレームに対する本体の動きを検出するように構成された検出器60,61,62,63と、を備え、検出器60,61,62,63が本体に結合され、本体に対して移動可能である。
(もっと読む)
車両用ミラー制御装置
【課題】車両用ミラーの鏡面角度をドライバにとって好適な角度に自動的に調整しながらも、乗員にとっての快適性を損ない難くすることを可能にする。
【解決手段】車両が走行中と判定した場合であって、且つ、いずれかの車両用ミラーをドライバが見ていると判断した場合には、ドライバが見ている車両用ミラーであると判断した車両用ミラーの最適角度を算出し、その算出結果に基づいて当該車両用ミラーについてのみ鏡面角度の調整を行う一方、車両が走行中でないと判定した場合、若しくは車両が走行中と判定した場合であって、且つ、いずれの車両用ミラーもドライバが見ていると判断しなかった場合には、車両用ミラーの鏡面角度の調整を行わない。
(もっと読む)
画像ベースの位置決定
【課題】プラットフォームの位置を識別するための方法および装置を提供する。
【解決手段】プラットフォームが動いている間、プラットフォームに関連するカメラシステムによって生成された一連の画像内の特徴が識別される。カメラシステムのパースペクティブの移動が、一連の画像内の特徴の位置の移動から識別される。プラットフォームの位置の変化が、パースペクティブの移動に基づいて識別される。
(もっと読む)
車両の操舵角計測装置
【課題】操舵角計測装置を改善することにより、ステアリングホイールの操舵角を作業効率を向上しつつ精度よく計測し得る操舵角計測装置に関する。
【解決手段】ステアリングホイール3とともに回転する反射面5を有する反射部材4と、前記反射面5との距離に基づいた信号を出力する第1の変位計7a及び第2の変位計7bからなるレーザ変位計7とを含む車両のステアリングホイール3の操舵角計測装置1である。前記反射面5は、前記第1の変位計7aとの距離を一定とする等距離面と、第1継ぎ面とが交互にかつ階段状に接続される階段状面Kからなる第1の反射面と、前記第2の変位計7bとの距離が漸減する傾斜面と、第2継ぎ面とが交互に接続される鋸歯状面からなる第2の反射面とからなる。しかも、前記傾斜面と、前記等距離面とは、位相が揃えられている。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
ワークテーブルのピッチエラーの測定方法
【課題】多数の板材を連続的に加工する加工機に好適な回転テーブルの回転角の誤差(ピッチエラー)を測定する方法に関し、ワークの連続加工中においても自動測定できるようにする。
【解決手段】ワークと略同形で、表面に所定角度毎に引いた放射状の計測線と、計測線の放射中心を検出させるマークを表示した測定用基板を用いる。加工機に設けられている搬入誤差検出手段により、テーブル上に搬入された測定用基板の中心の位置偏倚及び角度偏倚を検出し、次にテーブルを所定角度ずつ回動したときのカメラの画像上での各計測線の位置を検出し、先に検出した基板中心の偏差で補正した計測線の方向と、その本来の方向との差から、テーブルのピッチエラーを測定する。
(もっと読む)
計測装置、情報処理装置、計測方法、情報処理方法、および、プログラム
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲に基づいて、以降に投影される前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
情報処理装置及び情報処理方法
【課題】撮像装置と計測対象物体との関係が高速に変化している場合であっても、物体の位置及び姿勢の計測を精度良く行えるようにする。
【解決手段】2次元画像及び距離画像が撮像可能な撮像装置20、30により、被測定物体の3次元的な位置姿勢を推定する情報処理装置1であって、被測定物体の位置姿勢推定用照合データを保存する位置姿勢推定用照合データ保存手段110と、撮像装置が第1の位置姿勢において撮影した2次元画像を入力する2次元画像入力手段120と、撮像装置が第2の位置姿勢において撮像した距離画像を入力する距離画像入力手段130と、第1の位置姿勢と第2の位置姿勢の相対位置姿勢情報である位置姿勢差分情報を取得する相対位置姿勢情報入力手段と、位置姿勢差分情報に基づき、2次元画像及び距離画像に対して、位置姿勢推定用照合データが当てはまるように被測定物体の位置姿勢を算出する位置姿勢推定手段160とを設ける。
(もっと読む)
41 - 50 / 1,084
[ Back to top ]