
国際特許分類[G01B11/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129)
国際特許分類[G01B11/26]の下位に属する分類
軸の心合せ検査用 (33)
ホイールの心合せ試験用 (12)
国際特許分類[G01B11/26]に分類される特許
71 - 80 / 1,084
力学挙動解析システム、及び力学挙動解析方法
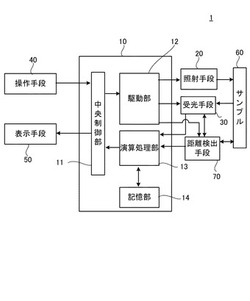
【課題】被解析試料の巨視的な動きを伴った場合であっても材料や構造物などの被解析試料の微視的な領域の力学挙動を簡便に解析可能な新規な力学挙動解析システム、及び力学挙動解析方法を提供する。
【解決手段】力学挙動解析システムは、被解析試料の解析表面を少なくとも被覆し、変形自在であって、かつ、被解析試料側の少なくとも表層に所定の周期構造が形成されている表面ラベルグレーティング膜及び被解析試料からなるサンプル60と、スポット光であるプローブ光を入射する照射手段20と、表面ラベルグレーティング膜からの回折光を検出する受光手段30と、被解析試料と受光手段との距離を検出する距離検出手段70と、回折角のデータを保持する記憶手段14と、記憶手段14に保持された複数の前記回折角のデータから、回折格子の周期構造変化を算出し、当該周期構造変化から被解析試料の力学挙動を解析する解析手段13と、を具備する。
(もっと読む)
エンコーダ及び校正方法

【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
光検出装置および電子機器
【課題】単一の受光素子を用いた簡単な構成による小型かつ低コストな近接/方向センサとして、対象物体の近接/非近接状態の変化とそれに直交する移動方向を、同時に最も効率よく検出して人体の動作に十分に追随させるための光検出装置を提供する。
【解決手段】受光素子200は、反射光103が直接入射する第1のウェル301と、第1のウェル301を挟んで対向し、かつ反射光103は遮光されて入射しない第2のウェル302及び第3のウェル303とを備えている。受光素子200による受信信号は、第1のウェル301の出力と第2のウェル302の出力との和、及び、第1のウェル301の出力と第3のウェル303との出力の和を、時間軸上で交互に出力する。この受信信号に基づいて、光検出装置天面の法線方向である第1の軸方向に沿う対象物体の近接状態と、前記対象物体の近接状態が変化した際の移動方向とが判定される。
(もっと読む)
計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法
【課題】投影面傾き計測装置、プロジェクタを小型化する。
【解決手段】投影面傾き計測装置11は、投光ユニットと、入射角センサと、を備える。入射角センサは、水平方向、垂直方向にそれぞれ、2つずつ配置される。投光ユニットは、スクリーンS上の水平方向、垂直方向に、それぞれ、設定された2つの測距点に光を投光して投光スポットを形成する。入射角センサは、投光スポットからの反射光を受光して、その入射角を検出する。この入射角センサは、2分割受光素子からなり、2つの受光素子に入射した光の受光割合に基づいて、反射光の入射角を検出する。このような構成により、位相センサで必須のレンズが不要となり、レンズの焦点距離を確保する必要もないので、小型化も可能となる。
(もっと読む)
封止容器の検査方法及び検査装置
【課題】目視に頼っていた封止容器のリッドの位置ずれ検査を光切断方式を用いて自動化する方式と検査装置を提供する。
【解決手段】パッケージ36にリッド37を接合した封止容器の上面へスリット光を照射し、スリット光に対し封止容器を相対的に移動させて封止容器の複数箇所にスリット光を照射し、パッケージ36の厚みにより分離したスリット光の端点の位置情報を光切断方式を用いて測定し、測定した平面方向の位置情報と予め定めた基準値とを比較する事によりパッケージ36に対するリッド37の位置ずれと傾きを判断する。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
縦型ルーパー設備におけるキャリッジ水平度測定方法および鋼帯の蛇行修正方法
【課題】鋼帯連続焼鈍ライン等の鋼帯連続処理ラインに設置されている縦型ルーパー設備において、ルーパーキャリッジの水平度を精度良く測定することができるキャリッジ水平度測定方法およびそれを用いた鋼帯の蛇行修正方法を提供する。
【解決手段】ルーパーキャリッジ11の水平度(水平度異常量)を光学式距離計21a〜21dを用いて測定するとともに、鋼帯1の寄り量(蛇行量)を測定し、その蛇行量が許容範囲を超えている場合には、ルーパーキャリッジ11の水平度を許容範囲内で変更して、鋼帯1の蛇行量が許容範囲内に収まるようにする。
(もっと読む)
71 - 80 / 1,084
[ Back to top ]