
国際特許分類[G01B11/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129)
国際特許分類[G01B11/26]の下位に属する分類
軸の心合せ検査用 (33)
ホイールの心合せ試験用 (12)
国際特許分類[G01B11/26]に分類される特許
31 - 40 / 1,084
露光装置及びデバイス製造方法
【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
金属板の外観評価方法

【課題】研磨部及び再研磨部の仕上がり具合を簡単な手法で定量的に評価できる金属板の外観評価方法を提供する。
【解決手段】この金属板の外観評価方法では、金属板1の表面のデジタル画像10をスキャナ4によって取得し、デジタル画像10の一部画像11に含まれる各ピクセルのRGB値をグレースケール変換して得られるAc値の波形パターンに基づいて研磨部2及び再研磨部3の外観の可否を判断する。波形パターンを用いることで、研磨部2及び再研磨部3の外観を容易かつ定量的に判断できる。また、この方法では、波形パターンに基づいて、研磨部2及び再研磨部3の研磨方向がスキャナ4の走査方向と一致しているデジタル画像10を判断対象として選別する。この前処理により、外観判断工程で用いる波形パターンのS/N比が向上し、判断精度が高められる。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
薄膜製造装置のアライメント調整方法、薄膜製造装置、該薄膜製造装置により製造した電気機械変換膜、電気機械変換素子、液滴吐出ヘッド及び液滴吐出装置
【課題】低コスト化を図れる導膜製造装置、製造した電気機械変換素子、液滴吐出装置を提供する。
【解決手段】第1のアライメント調整工程では着弾位置251をカメラ205で捕捉し着弾位置251がカメラ205の撮影撮影基準位置252に一致するように基板又は液滴吐出ヘッド201を相対的に移動する。第2のアライメント調整工程ではレーザレッドによってレーザ光を照射して照射跡を形成し照射跡をカメラ205で捕捉し照射跡がカメラ205の撮影撮影基準位置252に一致するように基板又はレーザヘッドを相対的に移動する。第3のアライメント調整工程では基板上に予め形成されているアライメントマークを撮像手段205で撮影したアライメントマークの形状に基づいて基板の向きを検知して基板の向きの調整を行いアライメントマークを撮像手段205の撮影基準位置に一致するように基板を移動することで基板の組付け位置の調整を行う。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】複数のZヘッドを切り換えながら、移動体の高さと傾斜を継続的に計測することにより、移動体を高精度で駆動する。
【解決手段】制御装置は、テーブルWTBの±X端部に設置された反射面39Y1,39Y2上に位置する2つのZヘッドZsR,ZsLを用いて、テーブルWTBの高さと傾斜を計測する。テーブルWTBのXY位置に従って、使用するZヘッドをZsR,ZsLからZsR’,ZsL(あるいはZsR,ZsL’)に切り換える。制御装置は、切り換えの際、座標つなぎ法を適用して、新たに使用するZヘッドZsR’(あるいはZsL’)の初期値を設定する。これにより、テーブルのXY位置に応じて使用するZヘッドが逐次切り換えられるにもかかわらず、切り換えの前後でテーブルの高さと傾斜の計測結果が保存され、テーブルを高精度で駆動することが可能になる。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
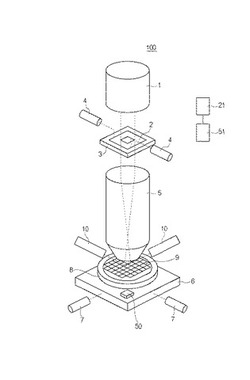
半導体レーザ素子の端面角度測定方法
【課題】半導体レーザ素子の共振端面の角度を容易に且つ精度良く測定することができる方法を提供する。
【解決手段】光導波路の光導波方向と交差する方向に並んだ複数の半導体レーザ素子を含む半導体レーザバー2を、共振端面2aが所定の基準線21bに沿うようにステージ21の基準面21a上に固定し、半導体レーザバー2の複数の半導体レーザ素子の共振端面からレーザ光Laを出射させ、レーザ光LaのFFPを測定し、FFPのピーク位置により定まるレーザ光Laの出射方向と、所定の基準線21b及び基準面21aとの相対角度から、半導体レーザ素子の共振端面の角度を算出する。
(もっと読む)
機器制御装置
【課題】複数人で構成されるグループが移動する経路上に設けられた1個以上の機器を到着に先立って制御することができる機器制御装置を提供する。
【解決手段】注視方向検出部2は、グループ内の各人が注視している方向を検出する。方向関係特定部3は、各人が注視している向きと照明機器が存在する方向との関係を特定する。グループ希望方向推定部4は、グループ内の全員について特定した関係に基づいて、グループ全体として照明機器が存在する方向への移動の希望を推定する。制御部5は、グループ希望方向推定部4による推定結果に基づいて、照明機器10_1〜10_Nを制御する。
(もっと読む)
3次元物体位置検出装置、そのプログラム
【課題】3次元辞書データから、対象物に関して測定されない領域に該当するデータを除去することで、高精度・高速な照合・認識を実現する。
【解決手段】概要姿勢の推定を行い(S3)、3次元辞書データを概要姿勢に応じて姿勢変換して、「概要変換後の3次元辞書データP’」を作成する(S4)。続いて「概要変換後の3次元辞書データP’」の点群を、測定器から対象物への距離方向と垂直な仮想平面へ投影する(S5)。そして、仮想平面を多数の矩形領域に分割し、各矩形領域毎に、その矩形領域に属する(投影された)複数の点のなかから測定器に最も近い点のみを選択し、選択された点のみから構成される3次元辞書データを再構築することにより、3次元辞書データから対象物に関して測定されない領域に該当するデータを除去する(S6)。
(もっと読む)
31 - 40 / 1,084
[ Back to top ]