
国際特許分類[G01B11/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129)
国際特許分類[G01B11/26]の下位に属する分類
軸の心合せ検査用 (33)
ホイールの心合せ試験用 (12)
国際特許分類[G01B11/26]に分類される特許
51 - 60 / 1,084
情報処理装置及び情報処理方法
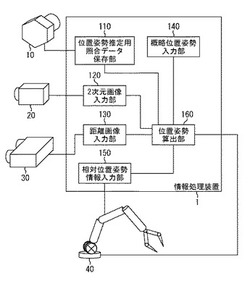
【課題】撮像装置と計測対象物体との関係が高速に変化している場合であっても、物体の位置及び姿勢の計測を精度良く行えるようにする。
【解決手段】2次元画像及び距離画像が撮像可能な撮像装置20、30により、被測定物体の3次元的な位置姿勢を推定する情報処理装置1であって、被測定物体の位置姿勢推定用照合データを保存する位置姿勢推定用照合データ保存手段110と、撮像装置が第1の位置姿勢において撮影した2次元画像を入力する2次元画像入力手段120と、撮像装置が第2の位置姿勢において撮像した距離画像を入力する距離画像入力手段130と、第1の位置姿勢と第2の位置姿勢の相対位置姿勢情報である位置姿勢差分情報を取得する相対位置姿勢情報入力手段と、位置姿勢差分情報に基づき、2次元画像及び距離画像に対して、位置姿勢推定用照合データが当てはまるように被測定物体の位置姿勢を算出する位置姿勢推定手段160とを設ける。
(もっと読む)
撮像装置及びプログラム

【課題】CMOS型イメージセンサ等を用いて、ローリングシャッター方式で撮像されたボール像が歪んでいても、ボールの運動を正確に解析することができるようにする。
【解決手段】撮像装置100は、ボール像が楕円形に歪んだ状態で含まれるフレームを、内領域A3とその内領域A3と内領域A3の外側の外領域A4とを有する楕円分離度フィルターによってフィルタリング処理することによって、分離度を算出する分離度算出手段7gと、内領域A3の中心位置、長径、短径及び傾斜角を変更しながら分離度算出手段7gによって算出される分離度が最大となる中心位置、長径、短径及び傾斜角をボール像の中心位置、長径、短径及び傾斜角として推定する推定手段7hと、推定手段7hによって推定されたボール像の中心位置の差分とフレーム間のフレーム数とフレームレートとから、ボールの速度を算出する速度算出手段7pと、を備える。
(もっと読む)
画像センサのチルトを求めるための方法
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
移動体及び移動面検出システム
【課題】照度の低い環境において、コントラストが低い移動面上を移動する移動体の位置及び姿勢、並びにその移動面の形状を検出する。
【解決手段】移動体及び移動面検出システム1は、移動体3と、移動体3上に配置された発光部4と、移動体3を俯瞰する位置に設けられたステレオカメラ5及び測距センサ6と、ステレオカメラ5及び測距センサ6の出力を処理する処理部7と、処理部7の出力を表示する表示部8とを備える。ステレオカメラ5は、発光部4のステレオ画像を撮像する。測距センサ6は、移動面に光を出射し、移動面で反射されて戻ってくる光の飛行時間に基づいて移動面を測距する。処理部7は、ステレオカメラ5が撮像したステレオ画像に基づいて移動体3の位置及び姿勢を検出するとともに、測距センサ6の出力に基づいて移動面の形状を検出し、移動体3の位置及び姿勢と、移動面の形状とを表示部8に表示する。
(もっと読む)
3次元範囲計測システム、3次元範囲計測プログラムおよび記録媒体
【課題】自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供する。
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
複数カメラの校正方法及び校正システム
【課題】カメラ校正における場所的な要求や演算負荷の要求をできるだけ低減し、車両の組み立てラインに組み込むことが容易となる、複数カメラの校正技術を提供する。
【解決手段】第1校正場の所定位置に当該車両を位置決めし、第1カメラによる基本撮影画像を取得し、基本撮影画像における基本校正指標群の画像上の位置である基本画像座標を算定し、基本校正指標群のワールド座標と基本画像座標との関係を表す第1校正関数を算定する。第2校正場に移動し、第1カメラによる第1撮影画像から第1画像座標を算定し、第2カメラによる第2撮影画像から第2画像座標を算定し、第1画像座標及び第1校正関数及び第1校正指標群のワールド座標を用いて車両姿勢ずれを算定する。車両姿勢ずれと第2画像座標と第2校正指標群のワールド座標とに基づいて、第2画像座標と第2校正指標群のワールド座標との関係を表す第2校正関数を算定する。
(もっと読む)
光軸調整システム
【課題】撮影画像における基準マーク画像のズレを考慮することにより光軸調整の誤差を低減する。
【解決手段】カメラ2と、タッチパネル式ディスプレイ3と、画像処理ECU4と、を備え、画像処理ECU4は、タッチパネル式ディスプレイ3の操作によりカメラ2により基準マークが撮影された撮影画像における基準マーク画像の位置が指示位置として指示されると、この指示位置と所定の基準位置との関係に基づいてカメラ2の光軸調整を行う光軸調整部41と、撮影画像の画面特性に基づいて撮影画像における基準マーク画像の位置ズレ量を算出する位置ズレ量算出部42と、位置ズレ量算出部42が算出した位置ズレ量により指示位置を補正する指示位置補正部43と、を備える。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
情報処理装置及び情報処理方法
【課題】 計測対象物体からの反射光を用いて3次元計測を行う手法において、計測の誤差に起因する、計測対象物体の3次元位置の取得精度の低下を防止することを目的とする。
【解決手段】 構造化光が投影された計測対象物体からの反射光の情報と、前記構造化光の光源の位置と、前記反射光を受光して前記反射光の情報を取得する受光部の位置とを用いた三角法により、前記計測対象物体の表面の複数の位置を取得する第一の取得手段と、前記複数の位置に基づき、前記計測対象物体の表面の位置および向きを取得する第二の取得手段と、前記複数の位置を取得する際の計測の誤差に関する情報と、前記計測対象物体の表面の位置および向きとに基づき、前記複数の位置の少なくとも一つを補正する補正手段と、を有することを特徴とする。
(もっと読む)
51 - 60 / 1,084
[ Back to top ]