
国際特許分類[G01C17/32]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | 磁気コンパス (194) | 電気磁気コンパス (156) | 電子コンパス (60)
国際特許分類[G01C17/32]に分類される特許
31 - 40 / 60
車両検索システム
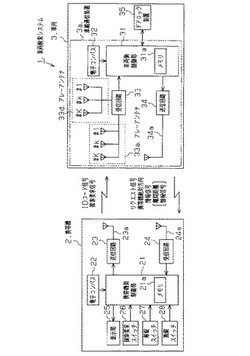
【課題】車両の方向を多様な場所で正確に検索できる車両検索システムを提供すること。
【解決手段】携帯機2から観た車両3の方向を検索する車両検索システム1は、携帯機2に設けられ、同携帯機2から観た絶対方位を検出する電子コンパス22と、車両3に設けられ、同車両3から観た携帯機2の相対方向を検出するアダプティブアレーアンテナ33a,33dと、同車両3から観た絶対方位を検出する電子コンパス32と、携帯機2の相対方向の情報と車両3から観た絶対方位の情報とに基づき、車両3から観た携帯機2の絶対方向を演算する車両側制御部31と、携帯機2に設けられ、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、電子コンパス22により検出された当該携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向又は絶対方向を演算する携帯機側制御部21とを備えている。
(もっと読む)
地磁気検出プログラム及び電子コンパス

【課題】漏れ磁界が存在する環境下であっても正確に地磁気を検出することができる地磁気検出プログラム及び電子コンパスを提供すること。
【解決手段】補正バイアスとしての調整磁界を用いて、漏れ磁界がどちらの極性のバイアス磁界であるのかを検出し、その後調整磁界を制御して漏れ磁界に対応するオフセットを略0にする。オフセットが略0となる2つの出力対(A1・A2とB1・B2)を用いて、同じ極性の磁界を印加した際の磁気センサの出力値を通過する仮想線X,Yを作成する。磁気センサのセンサ素子の特性は上述したように対称性を有するので、仮想線X,Yの交点が素子特性におけるピーク位置であると考えられる。したがって、バイアス磁界が0の位置から仮想線X,Yの交点までが漏れ磁界であり、これを用いて地磁気を検出する。
(もっと読む)
加速度・角速度・磁気方位検出用複合センサ及びこれを用いた装置
【課題】小型かつ低コストにして制御演算部の負担が小さく、加速度・角速度及び磁気方位を高精度に検出可能なセンサ及びこれを用いた検出装置を提供する。
【解決手段】基体2と、下部封止板3及び上部封止板4と、一端が基体2の内面に連結された弾性梁部5と、弾性梁部5の中心部に取り付けられた重錘部6と、重錘部6の下面に形成された励磁コイル7と、下部封止板3の上面の重錘部6と対向する部分に配置された磁気検出素子8と、重錘部6の上面と上部封止板4の下面とに対向に形成された一対の加振機構9とから複合センサ1を構成する。励磁コイル7への励磁電流の供給及び加振機構9への加振電流の供給を制御し、磁気検出素子8の出力から、互いに直交する3方向についての加速度と角速度と磁気方位を検出する。
(もっと読む)
地磁気センサ
【課題】センサパッケージの薄型化及び小型化が可能であると共に、部品の取付工程を削減することができる地磁気センサを提供すること。
【解決手段】基板110面上に互いに感度軸方向を直交させた3つのセンサ素子130a,130b,130cを備えた地磁気センサ100であって、前記センサ素子130a,130b,130cは、前記基板110面に取り付けられる少なくとも1つの取付面134と、ボンディング用電極131が形成された電極形成面132とを有する多面体からなり、少なくとも2つのセンサ素子130a,130bは前記電極形成面132を前記基板110面に対して傾斜させて取り付けられている。
(もっと読む)
1つのパッケージに統合され傾斜の補償がなされるコンパス
磁気コンパスは、磁気センサと、加速センサと、それぞれのセンサと電子的に通信するそれぞれの信号調整回路と、マイクロプロセッサとを含む。これらのコンポーネントは単一電子パッケージに配され構造的に結合される。単一電子パッケージは、センサと、信号調整回路と、マイクロプロセッサとを支持し、小型化した磁気コンパスを提供する。更に、温度センサが単一電子パッケージと結合され、上記のコンポーネントの少なくとも何れかのものに対して温度補償を提供する。  (もっと読む)
(もっと読む)
電子コンパスシステム
【課題】3軸の磁気センサのみで携帯電話の傾斜角と方位角を簡便に算出することができる電子コンパスシステムを提供しようとするものである。
【解決手段】地磁気ベクトルM0の互いに直交する3軸成分を検出する3軸の磁気センサと、上記地磁気ベクトルM0と上記磁気センサの座標系の第1軸とを一致させ、上記座標系の第2軸のプラス方向を地磁気の北方向に固定し、かつ、上記座標系の第3軸を水平方向に固定して、上記地磁気ベクトルM0の伏角データをデータベースから出力し、又は上記磁気センサの3軸座標軸系の第2軸を水平姿勢にして伏角データを算出して、上記磁気センサによって検出した3軸成分データと上記伏角データとより傾斜角及び方位角を算出する方法とを備える。
(もっと読む)
移動体の姿勢及び方位検出装置
【課題】単一のGPSアンテナからの受信信号に基づいて算出される位置及び速度と、加速度センサ及び角速度センサで構成される慣性センサ出力を用いて、リアルタイムに移動体のロール、ピッチ及び方位を算出できる姿勢及び方位検出装置を提供することを目的とする。また、GPSの支援が得られない場合においても、ロール、ピッチが提供できる姿勢検出装置装置を提供できる。
【解決手段】GPSから得られる位置及び速度と慣性センサ出力から、移動体のロール、ピッチ及び擬似方位を算定する。この算定において、角速度センサを用いて移動体の回転時に生じる横滑り角を検出することによって、擬似方位を補正要望の真方位を求め、誤差最小規範に基づいて、フィルタのパラメータ及びウェートを決定する構造のフィルタによって、ロール、ピッチの雑音を低減する技法を用いて高精度のロール及びピッチを得ている。
(もっと読む)
磁気データ処理装置、方法およびプログラムならびに磁気処理システム。
【課題】特定条件下において加速度センサの出力を用いずに磁気センサの出力に基づいて鉛直方向を導出する。
【解決手段】基本ベクトルの一次結合である3次元ベクトルデータであって3次元磁気センサから出力される磁気データを順次入力する入力手段と、前記3次元磁気センサの規定範囲内の回転を示す複数の前記磁気データからなる母集団データ群の分布が偏平であるとき、前記母集団データ群の分布を示す近似平面の垂線方向を鉛直方向を示す鉛直方向データとして導出する鉛直方向導出手段と、を備える磁気データ処理装置。
(もっと読む)
方位算出プログラム及び電子コンパス
【課題】傾斜センサを用いずに、傾斜角があるシステムにおいても方位算出することができる方位算出プログラム及び電子コンパスを提供すること。
【解決手段】本発明の方位算出プログラムにおいては、互いに他と直交する三軸のうちの任意の二軸をそれぞれX軸及びY軸と設定したときの、X軸用の磁気センサからの出力及びY軸用の磁気センサからの出力を用いてX−Yリサージュ波形データを求め、Y軸用の磁気センサからの出力を用いて前記X−Yリサージュ波形上の方位角候補を求め、前記方位角候補に対して事象判定を行って方位角を決定する。
(もっと読む)
電子機器、およびその制御方法
【課題】電磁波を用いた非接触通信が行われるとき、地磁気センサの検出した地磁気が正確ではない可能性のある方位処理を規制することを目的とする。
【解決手段】非接触通信手段による前記電磁波を用いた非接触通信と、前記方位算出手段と前記方位情報報知手段との少なくとも一方による方位処理とが同時的に実施される場合に、前記方位算出手段と方位情報報知手段との少なくとも一方による方位処理を規制する。
(もっと読む)
31 - 40 / 60
[ Back to top ]