
国際特許分類[G01C17/32]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | 磁気コンパス (194) | 電気磁気コンパス (156) | 電子コンパス (60)
国際特許分類[G01C17/32]に分類される特許
21 - 30 / 60
電子式方位計

【課題】 北方位補正により指針が指し示す方位の校正処理を行う場合に、計測された磁北の方向に対してどの程度の補正が行われるのかユーザが直感的に認識することのできる電子式方位計を提供する。
【解決手段】 外部から操作可能にされたリューズスイッチを備え、北方位補正のモード中、リューズスイッチから回転操作信号が発生されるごとに(S41,S42)、指針を順方向や逆方向に1ステップ回転させるとともに(S45,S46)、方位補正値記憶部に記憶される補正値βを1ステップ分の角度(±6゜)ずつ変更していく。
(もっと読む)
車載用電子コンパス

【課題】磁気ノイズを検出する手段を設ける上での部品点数の増加を回避しつつ、方位演算の信頼性を的確に確保することのできる車載用電子コンパスを提供する。
【解決手段】この車載用電子コンパスは、互いに直交する3軸方向の磁気成分を検出する3つの磁気検出素子2a〜2cを有する磁気センサ2を備え、磁気センサ2に印加される地磁気を3軸方向の磁気成分に分解して磁気センサ2により検出するとともに、検出した磁気成分に基づいて車両の進行方向の方位を演算し、演算した方位を表示装置3に表示する。ここでは、磁気検出素子2a及び磁気検出素子2bの出力信号Sx,Syに基づいて車両の進行方向の方位を演算しつつ、磁気検出素子2cの出力信号Szの経時的な変化に基づいて磁気ノイズの有無を監視する。そして、磁気ノイズのレベルに応じて表示装置3に表示される方位の表示色を変更する制御を実行する。
(もっと読む)
現在位置表示装置
【課題】 3軸の磁気検知部で地磁気ベクトルの方位角と伏角を求めて、この地磁気情報に基づいて、表示画面に表示されている地図情報の向きを安定して切り換えることができる現在位置表示装置を提供する。
【解決手段】 地磁気ベクトルを検知して得られた方位角の変化に基づいて、表示画面15aに表示されている現在位置の地図情報が常に表示画面15aの向きに合うように段階的に回転させられる。方位角の変化が規定角度になると地図情報を回転させるが、地磁気ベクトルの伏角が大きくなるにしたがって、前記規定角度が大きくなるように切り換えられる。その結果、伏角の大きい地磁気ベクトルを検知する際のノイズが表示されている地図情報の回転切り換えに与える影響を少なくできる。
(もっと読む)
方位検出器
【課題】弱い磁力を検出でき、電気回路の増幅率を上げることなく、羅針盤内磁石は集磁器や周囲の磁性金属の影響を受けることなく方位の狂わない高信頼性の、しかも簡単安価に実現し得る方位検出器を提供する。
【解決手段】両側に集磁器21ax,21bxを配置した第1のホール素子S1xと、両側に集磁器21ay,21byを配置した第2のホール素子S1yとを、互いに直交し、かつ四辺形の相隣る2辺となる位置に配置し、かつ前記四辺形の他の相隣る2辺に、前記第1と第2のホール素子の両側に設けた集磁器21ax,21bx、及び21ay,21byに磁気バランスさせた集磁器22ax、22bxおよび22ay,22byを設け、前記第1のホール素子と第2のホール素子からの電気信号により方位を求める。
(もっと読む)
計算機装置
【課題】GPS方位計において、整数値バイアスを少ない計算負荷により短時間で導出する。
【解決手段】GPSアンテナ9および10のアンテナ間距離を、GPS衛星11からの測位信号の搬送波の1/2波長以下とするとともに、GPS信号受信部7および8が用いる基準クロックを共通にすることによって、方位計算部12は、GPS信号受信部7および8から得られる信号を用いて、搬送波位相観測値の一重差方程式に含まれる整数値バイアスを簡単な代数計算だけで解ける。
(もっと読む)
電子式方位計および方位補正制御方法
【課題】電子式方位計において2点補正などの較正処理を比較的容易に且つ精度良く行えるようにすることである。
【解決手段】第1のスイッチ入力があった際に、地磁気検出手段から出力されている前記第1と第2のデータを記憶させる第1の記憶制御手段(ステップS24)と、第1のスイッチ入力時に前記方位表示手段が指し示していた方位を算出して記憶させる方位記憶制御手段(ステップS25)と、第1のスイッチ入力の後で、第2のスイッチ入力の待機中に、機器本体が回転されても前記記憶されている方位が指し示されるように方位表示手段を制御する特定方位指示制御手段(S27,S28)とを備える。そして、第1のスイッチ入力時と第2のスイッチ入力時に取得したデータから補正データを求める(S31)構成とした。
(もっと読む)
電子機器及びプログラム
【課題】6軸センサで検出された検出結果に基づいて方位計測をする際に、振動発生中であっても精度のよい方位計測ができるようにする。
【解決手段】6軸センサ15は、通常時は3軸加速度(傾斜)センサの検出結果も用いて、3軸の地磁気センサにより地磁気を検出して方位を計測する。電話の着信があった場合、バイブレータ13或いはスピーカ14の報知動作による振動が6軸センサ15に伝わるため、3軸加速度センサに悪影響を与え、方位計測の精度劣化が生じる。これを防止するため、6軸センサ15で検出される検出結果のうち、バイブレータ13或いはスピーカ14の報知動作が行われるときは、3軸加速度(傾斜)センサの検出結果を使用しないようにして方位計測を行うようにした。
(もっと読む)
磁気センサ制御回路、及び磁界測定装置
【課題】磁界測定装置において、高分解能・高精度での測定とダイナミックレンジの拡大との両立を図る。
【解決手段】磁気センサ8の入出力特性の線形領域に設定される磁界計測範囲では、ΔΣ変調器22及びデジタルフィルタ24からなるADCが磁気センサ8の出力を高分解能の磁界計測データDMに変換する。磁気センサ8には、コイル10によりバイアス磁界を及ぼし、磁界計測範囲をシフトさせることができる。コイル10への駆動電流は、電流DAC28により離散的に変化させる。バイアス磁界の変化による磁界計測範囲の移動ステップは、ADCによる磁界強度の分解能より大きく設定する。
(もっと読む)
電子コンパスおよび電子コンパスの零点誤差を求める方法
本発明は、電子コンパスの零点誤差(Hx0,Hy0)を求める方法に関する。この方法は、3軸磁気センサを用いて電子コンパスの第1座標系における第1磁界強度を測定するステップと、地表面に平行な第2座標系(x,y)における伏角補正された第2磁界強度(200)を第1磁界強度から計算するステップと、伏角補正された第2磁界強度(200)に当てはめ関数(210)を当てはめるステップと、当てはめた当てはめ関数(210)から零点誤差(Hx0,Hy0)を求めるステップとを有する。本発明は、電子コンパスを動作させる方法にも関する。この方法は、磁気センサを用いて測定された第1磁界強度から第2座標系(x,y)における伏角補正された磁界強度(Hx0,Hy0)を計算するステップと、伏角補正された第2磁界強度(Hx0,Hy0)から上述した方法で求めた零点誤差(Hx0,Hy0)を減算することによって零点補正される第3磁界強度(Bx,By)を計算するステップと、南北方向に対して第2座標系(x,y)の軸(x)が偏差する方位角を計算するステップとを有する。 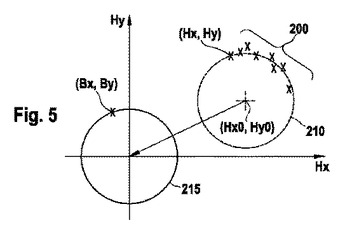 (もっと読む)
(もっと読む)
方位角計測方法および方位角計測装置
【課題】出力データ群の取得時に、異常磁界の影響がある場合や、方位角計測装置が十分に移動しない場合でも、真の基準点と異なる座標を基準点と誤推定しない方位角計測方法および方位角計測装置を提供する。
【解決手段】X軸およびY軸ホール素子の出力を10点取得すると(S23)、すでに基準点を1回以上求めているかどうか判定する(S24)。基準点が求められている場合は、その基準点と最新の出力値との距離が地磁気サイズとして妥当か判定する(S26)。妥当である場合は、データバッファ部18から古いデータを削除し今回取得した出力データを加え(S27)、それら出力値からの距離が等しくなる基準点を推定し(S29)、その推定された基準点と各出力値が形成する円周との半径距離が地磁気サイズとして妥当か判定する(S30)。妥当である場合は、推定された基準点をX軸およびY軸ホール素子のオフセット値として出力する(S31)。
(もっと読む)
21 - 30 / 60
[ Back to top ]