
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
181 - 190 / 275
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの作成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。車両からの風景を撮影した撮影画像の類似度を算出して、各撮影画像に類似度を付与し、互いに類似度が相違する処理対象撮影画像を有用撮影画像として選択し、この有用撮影画像から画像特徴点データを生成して、参照データとしてデータベース化する。
(もっと読む)
画像処理システム及び位置測位システム

【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの生成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、撮影画像に特定被写体が含まれている可能性を表す撮影状況情報に基づいて画像特徴点の重要度を決定し、この重要度に基づいて画像特徴点から撮影画像に対応する画像特徴点データを生成し、画像特徴点データを当該画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、参照データとして生成する画像処理システム。
(もっと読む)
位置算出方法及び位置算出装置
【課題】慣性航法を利用した位置算出の正確性を向上させるための新たな手法を提案すること。
【解決手段】自動車に設置されたジャイロセンサーの検出結果を用いて、移動体である自動車の姿勢及び移動方向が検出される。そして、検出された姿勢に基づいて、自動車に設置された加速度センサーの検出結果が、相対座標系から絶対座標系に座標変換され、座標変換後の検出結果を用いて、速度ベクトルが算出・更新される。そして、算出された速度ベクトルが検出された移動方向を用いて補正され、補正された速度ベクトルを用いて、自動車の位置が算出・更新される。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】画像認識による車両位置の特定技術を多くの場面に適用可能にする技術の提供。
【解決手段】基準車両の周囲の風景を撮影した撮影画像から基準となる基準画像特徴点を抽出し、前記基準車両の周囲の風景を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準画像特徴点の前記撮影画像上での位置を示す基準パターン情報に対して前記基準位置を示す情報を対応づけ、前記基準画像特徴点のうち、環境に応じて前記撮影画像上での位置が変動し得る変動地物の像に由来する前記基準画像特徴点に対しては、前記変動地物の像に由来することを示す情報と、前記変動地物の前記撮影画像上での位置が前記環境に応じて変動することに対応した前記基準画像特徴点の前記撮影画像上での変動範囲を前記環境ごとに示す情報とを対応付けて所定の記録媒体に記録する。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照用画像データの作成に適した画像処理システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、画像特徴点に割り当てられた重み係数に基づいて画像特徴点から撮影画像毎の画像特徴点データを生成する画像特徴点データ生成部と、撮影画像中における画像特徴点データの分布状態に応じて画像特徴点に与えられる重み係数を調整する調整係数を設定する調整係数設定部と、画像特徴点データを画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、風景画像認識のために利用される参照データとしてデータベース化する参照データデータベース化部とを備えた画像処理システム。
(もっと読む)
可搬型携帯端末及び方位推定プログラム
【課題】高精度な方位推定を実現する。
【解決手段】水平分力期待値推定部40が、可搬型携帯端末100の位置情報(Pos)に対応する、地磁気の水平分力の大きさの期待値(Mag_Hor_Ex)を取得し、選択部50は、地磁気センサ14において検出された地磁気の水平分力の大きさ(Mag_Hor)が、期待値から所定範囲内にあるか否かを判定し、その判定の結果、検出された水平分力の大きさが、所定範囲内にあると判定された場合に、地磁気センサ14の検出結果を用いた推定方位(Dir_Mag)を出力する。
(もっと読む)
自車位置認識システム
【課題】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する際に、その推定自車位置の誤差範囲をできるだけ正確に算定できる技術の提供。
【解決手段】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する自車位置算定部と、推定自車位置を基準として推定自車位置の存在可能範囲を基本誤差範囲として算定する誤差範囲算定部とを備えた自車位置認識システム。車両走行方向を基準方向として当該基準方向に対する誤差の発生方向に偏りを有する方向性誤差要因の1つ又は2つ以上について、誤差の発生量の推定値である推定誤差量を算出する推定誤差量演算部と、方向性誤差要因毎の誤差の発生方向及び推定誤差量に基づいて、前記基本誤差範囲を修正する誤差範囲修正部とを備えている。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
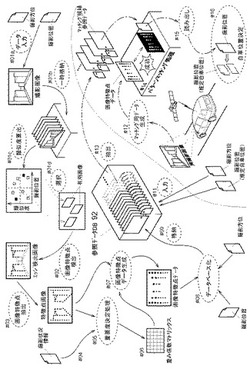
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、人の判断を要求することなく、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データデータベースと、車載カメラによる風景の実撮影画像から抽出された画像特徴点からなるマッチング用データにおける画像特徴点の分布状態と撮影位置に基づいて前記マッチング用データのマッチング相手候補として参照データデータベースから抽出する参照データを決定する抽出参照データ決定部と、決定された参照データとマッチング用データとのマッチングで成功した参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部とを備えている。
(もっと読む)
風景マッチング用参照データ生成システム及び位置測位システム
【課題】多数のプローブカーから収集された撮影画像に基づき、風景画像マッチング用の効果的な参照用画像データを生成する。
【解決手段】推定自車位置を算定する機能を有する複数のプローブカーによって順次取得されたプローブデータから取り出された所定撮影位置領域の撮影画像の撮影位置の精度信頼度を評価して、この精度信頼度を撮影画像に付与し、所定度以上の精度信頼度を有する複数の撮影画像を処理対象撮影画像として選別し、各々の処理対象撮影画像の画像特徴点を抽出し、それらを統計処理して画像特徴点データを生成する。この画像特徴点データにこの画像特徴点データの元になった処理対象撮影画像の撮影位置を関係付けて、風景マッチングに利用される参照データが生成される
(もっと読む)
181 - 190 / 275
[ Back to top ]