
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
171 - 180 / 275
位置検出装置、方法及びプログラム
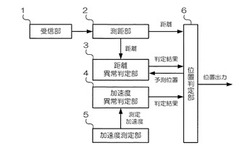
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
車両用現在位置検出装置

【課題】角速度に対する出力電圧特性が非線形のジャイロスコープを用いても、精度よく車両の走行軌跡を推定できるようにする。
【解決手段】角速度センサ22の出力値のゲイン誤差として、角速度センサ22の車両への取り付け角度を要因とする取り付け角ゲイン誤差と、角速度センサ22の角速度に対する非線形ゲイン特性を要因とする角速度ゲイン誤差とを区別して推定する。すなわち、カルマンフィルタAにより取り付け角ゲイン誤差を推定した後、カルマンフィルタBにより取り付け角ゲイン誤差および角速度ゲイン誤差の推定を実施する。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
位置標定装置、位置標定方法および位置標定プログラム
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
(もっと読む)
現在位置表示装置
【課題】GPS衛星信号に基づいて現在位置を算出するのに必要な演算時間と、現在位置表示装置の加減速状態とを考慮して、現在位置をより適正な位置に表示する。
【解決手段】過去の複数のGPS測位位置における現在位置表示装置の速度変化率を取得する速度変化率取得手段と、過去の複数のGPS測位位置に対する各重み付け係数を記憶する重み付け係数記憶手段と、過去の複数の速度変化率と対応する各重み付け係数とに基づき、最新の前記GPS測位位置における現在位置表示装置の速度変化率を予測速度変化率として算出する予測速度変化率算出手段と、最新のGPS測位位置と予測速度変化率とに基づき、GPS受信機によるGPS測位位置の出力時における現在位置表示装置の位置を推定位置として算出し、地図上の前記推定位置に現在位置マークを表示させる表示制御手段と、を備える。
(もっと読む)
位置情報記録装置、同装置を備える撮像装置および位置情報記録方法
【課題】 電波受信不能時には相対的な位置情報を記録し、電波受信が可能になったときに相対的位置情報を測位情報に変換し記録する位置情報記録装置等に関する。
【解決手段】 無線信号を受信する受信手段、測位情報を記録する合図を発する操作手段、無線信号に基づいて地理的位置を測位し測位情報を算出する位置情報算出手段、測位情報を記録する測位情報記録手段、基準位置からの方向と移動距離からなる変位情報を算出する移動軌跡情報算出手段、合図が発せられたとき測位情報が得られていないときには変位情報によって基準となる位置からの相対的な位置に係る相対位置情報を算出し合図に係る情報と関連づけて記録する相対位置情報記録手段と、測位情報が得られたとき、相対位置情報記録手段にすでに記録されている相対位置情報を測位情報に変換する位置情報変換手段、を有する位置情報記録装置による。
(もっと読む)
端末位置特定システム、移動端末及び端末位置特定方法
【課題】AR技術において、移動端末の位置を高精度且つ確実に特定することが可能とする。
【解決手段】端末位置特定システムでは、移動端末の概略位置情報に基づき、当該概略位置から所定の距離以内に存在するランドマークのランドマーク情報が検索され、検索されたランドマーク情報が移動端末に送信される。これにより、移動端末は、移動端末の周辺に存在するランドマークに関するランドマーク情報を取得することができる。また、サーバにおいて予め記憶されていたランドマーク情報が移動端末に送信されるので、確実にランドマーク画像に基づく移動端末の位置特定を行うことが可能となる。そして、ランドマーク画像に基づき当該画像の撮影位置が解析され、その撮影位置が移動端末の所在位置として移動端末において管理され、位置の補正に用いられるので、高精度な移動端末の位置特定が可能となる。
(もっと読む)
ナビゲーション信号送信装置、ナビゲーション信号送信方法および位置情報提供装置
【課題】屋内でマルチパスフェーディングの大きい環境においても精度を低下させることなく位置情報を提供する位置情報提供システムを提供する。
【解決手段】
位置情報提供装置100は、屋内送信機200から送信される、異なったPRNコードでスペクトラム拡散符号化され、送信アンテナTX−ANT1およびTX−ANT2から各々送信される測位信号を、受信アンテナRX−ANTにより受信する。位置情報提供装置100は、送信信号のPRNコードをそれぞれ独立で非同期でサーチする。始めに一つ目のPRNコードが捕捉できた場合、その同期ループを用いて他チャネルにて他のPRNコードの捕捉を試みる。2つのチャネルで同期捕捉ができた場合は、一方のチャネルの信号を選択して、測位の処理が実施される。
(もっと読む)
道路勾配計測装置及び道路勾配計測方法
【課題】道路勾配の計測精度の向上を図る。
【解決手段】GPS12の受信感度が所定のレベル以上であって標高に変化が検出された場合、勾配算出部25は、GPSデータ取得部21によりGPS12から取得された走行速度、標高等のデータを用いて道路の勾配を算出する。標高に変化がないとき、定地走行抵抗算出部22は、ECUデータ取得部23により取得されたECUデータを用いて定地走行抵抗を算出し、定地走行抵抗保持部27に保持させる。このときの勾配は0である。GPS12の受信感度が所定のレベルに達していないとき、勾配算出部25は、保持されている定地走行抵抗とECUデータ取得部23により取得されたECUデータを用いて道路の勾配を算出する。
(もっと読む)
ナビゲーション装置、車載センサの精度推定方法、および、プログラム
【課題】車載センサの信頼度を簡易な方法で推定する技術を提供する技術を提供する。
【解決手段】ナビゲーション装置100は、車載センサの精度を推定するナビゲーション装置であって、特定の区間の距離が記録されている地図データを記憶している記憶手段と、車載センサを用いて、当該区間の距離を計測する計測手段と、地図データに記録されている距離と、計測手段で計測された距離と、のずれ量に基づいて、車載センサの精度を推定するセンサ精度推定手段と、を備える。
(もっと読む)
171 - 180 / 275
[ Back to top ]