
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
151 - 160 / 275
位置推定装置、位置推定方法およびプログラム
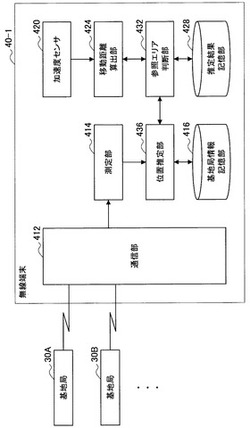
【課題】位置推定装置、位置推定方法およびプログラムを提供する。
【解決手段】基地局の位置情報を記憶している基地局情報記憶部と、前記基地局情報記憶部に記憶されている位置情報が制限範囲内である基地局の位置情報、および当該基地局から送信された無線信号の信号強度の測定情報に基づき、前記無線信号の測定位置を推定する位置推定部と、を備える位置推定装置。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置

【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
車両用現在位置検出装置
【課題】角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正する。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 車両移動を含む移動経路の軌跡の取得精度を向上させることができて、且つ、消費電力量を抑えることのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段(15)と、方位及びユーザの動きを計測する計測手段(16、17)と、計測手段の計測結果に基づき、ユーザの移動種別又は停止の判定を行う判定手段(21)、及び、ユーザの移動方向を特定する特定手段(22)と、車両による平均移動速度を算出する移動速度算出手段(10)と、車両による移動中に、特定手段で特定された移動方向へのこの平均移動速度での移動距離を、絶対位置測定手段により求められた基準位置情報に積算することにより移動位置を求める位置算出手段(10)と、を備える。
(もっと読む)
測位装置、測位方法、および、プログラム
【課題】 測定精度の高い位置データおよび軌跡データを取得することのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段と、移動方向及び移動量を計測する移動計測手段と、移動計測手段により計測された移動情報を当該移動の始点の位置情報に積算していくことで現在位置を算出する自律測位手段と、絶対位置測定手段により求められた現在位置の精度指標と自律測位手段により求められた現在位置の精度指標とを比較して、より高精度な現在位置データを選択する位置選択手段とを備え、絶対位置測定手段により求められた現在位置データが位置選択手段によって選択された場合には、選択された現在位置を基準点として設定し、自律測位手段により求められた現在位置の精度指標は、基準点から累積的に精度が低下するように設定される。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
位置測定装置、および位置測定方法
【課題】移動体の絶対位置を簡単に精度高く取得できなかった。
【解決手段】移動体の最新の位置情報を格納しており、移動速度と移動方向を含む移動情報を取得する移動情報取得部と、位置情報と移動情報とを用いて移動体の予測位置情報を取得する予測位置情報取得部と、2以上の衛星からGPS信号を受信するGPS信号受信部と、2以上の衛星ごとにGPS信号を用いて、移動体と各衛星との擬似距離を取得する擬似距離取得部と、2以上の各衛星の擬似距離を用いて新位置情報を算出する新位置情報算出部と、新位置情報と予測位置情報との距離を算出する距離算出部と、距離が第一閾値を超えないか否かを判断する判断部と、第一閾値を超えない場合に新位置情報を最新の位置情報として書き込む位置情報更新部と、各部の処理を繰り返えさせる制御部とを具備する位置測定装置により、絶対位置を簡易な構成で精度高く取得できる。
(もっと読む)
加速度データ補正装置、及び、ナビゲーション装置
【課題】加速度センサとスピーカとが同一の筐体に内蔵されている装置において、加速度センサ出力からスピーカの振動の影響を除去すること。
【解決手段】筐体100に内蔵スピーカ132と加速度センサ124とが備え付けられた電子装置(カーナビゲーション装置)10は内蔵スピーカ132の振動が加速度センサ124の出力に及ぼす影響を除去する加速度データ補正部140を備え、加速度データ補正部140は、制御手段110と、内蔵スピーカ132に供給される音声信号をフーリエ変換する音声信号処理部141と、加速度センサ124の出力をフーリエ変換する加速度信号処理部142と、内蔵スピーカ132から音声信号が出力される場合に、ともにフーリエ変換された加速度センサの出力から音声信号の影響分を減じた後に逆フーリエ変換を行う信号合成部143と、を備える。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
衛星信号捕捉方法及び受信装置
【課題】衛星信号の捕捉を適切に行うための新たな手法の提案。
【解決手段】GPS衛星からのGPS衛星信号を受信した受信信号を用いて、第1のドップラー周波数である仮ドップラー周波数を算出する。そして、加速度センサーを少なくとも含むセンサー部の計測結果を用いて慣性航法演算を行う慣性航法装置の算出結果と、仮ドップラー周波数とを用いて、第2のドップラー周波数である補助ドップラー周波数を算出する。そして、補助ドップラー周波数を用いてドップラー周波数を算出して、GPS衛星信号を捕捉・追尾する。
(もっと読む)
151 - 160 / 275
[ Back to top ]