
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
141 - 150 / 275
経路案内装置、経路案内方法及び経路案内プログラム
【課題】案内経路上で複数の部分が近接している箇所を通行するときのルートマッチング精度を向上させる。
【解決手段】経路案内装置は、経路探索サーバから経路データを取得する手段と、経路案内装置の現在位置を測位する手段と、測位位置を経路上の所定の位置に補正する手段と、補正位置に基づいて経路案内を行う手段と、測位位置及び/又は補正位置に基づいて経路案内装置の予測速度を計算する手段と、計算した予測速度で経路案内装置が経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する計算手段と、最新補正位置に対応する測位時刻から所定時間経過後に測位された対象測位位置が予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、対象測位位置に対する補正を行わないように補正手段を制御する制御手段と、を有する。
(もっと読む)
インフラ協調車載機およびインフラ協調車載機用のプログラム

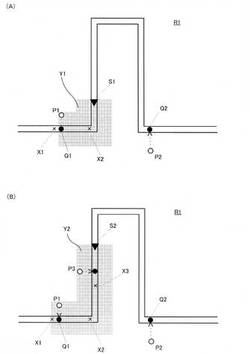
【課題】道路上または道路近傍の通信装置と連動したインフラ協調システムにおいて、インフラ協調に適した方法で、マップマッチング機能を利用せず、逸脱判定を行う。
【解決手段】ビーコンからデータを取得してサービスインした後に経路を逸脱したと判定した場合、注意喚起の報知をせずサービスアウトする。逸脱したか否かは、自律航法用のセンサの出力に基づいて、車両の現在の走行方位、および、データを取得してから現在まで車両が走行した距離を算出し(ステップ141)、走行した距離と当該データに含まれる当該経路中の各区間の長さの情報とに基づいて、車両が現在走行中の現在走行区間を特定し(ステップ142)、当該データに含まれる経路中の各区間が向いている方位の情報に基づいて、現在走行区間の向いている方位を特定し(144)、算出した走行方位と、現在走行区間が向いている方位との乖離量に基づいて、逸脱したか否かを判定する(146)。
(もっと読む)
携帯通信端末
【課題】取得する位置情報の精度を高めるとともに、位置情報を選択的に取得すること。
【解決手段】照明装置が設置されている位置を示す位置情報により変調された光を当該照明装置から受光する受光部と、前記受光部に照射された光に基づく電気信号を復調して前記位置情報を取得する復調部と、前記受光部の受光面の全面を覆う形状の遮光部材を有し、当該遮光部材により前記受光面の全面が覆われている状態の遮光状態、あるいは、前記受光面が前記照明装置から照射された光を受光可能な状態の受光状態に切り換える遮光構造部と、を備えることを特徴とする携帯通信端末。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法測位と間欠的なGPS測位とを併用して移動経路中の各地点の位置データを取得していく場合に、間欠的にGPS測位を実行するタイミングを適切に決定することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS測位手段に間欠的に測位を行わせる(S11〜S14)一方、この間欠的な測位の間に自律航法測位手段に連続的に測位を行わせて(S5,S6)移動経路に沿った位置情報を取得していく測位制御手段を備え、前記測位制御手段は、基準地点と測位地点との二点間距離を算出する距離算出手段(S8)と、距離算出手段により算出された二点間距離に基づきGPS測位手段の間欠的な測位の実行タイミングを制御する測位タイミング制御手段(S10)とを有する。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSで現在位置が測位できないときに好適な表示を行う。
【解決手段】GPS受信機が受信したGPS信号に基づいて、移動体の現在位置が検出されると(S200:Yes)、検出された現在位置に応じて、表示部の地図画像上に現在位置を表示させる(S202)。GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、移動体の現在位置を推定する(S206)。推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない(S212)。
(もっと読む)
ヨーレートのずれ検出装置
【課題】ヨーレートセンサにより検出されたヨーレート検出値のずれを正確に検出する。
【解決手段】自車両のヨーレートを検出するヨーレートセンサ30と、自車両の前方の物体を検知する前方物体検知センサ31と、前方物体検知センサ31により検知された物体が固定物であるのかを認識する前方物体認識部10と、前方物体認識部10により認識された固定物が自車両に対してその横方向に相対的に移動する横移動量を測定する横移動量測定部12と、横移動量測定部12により測定された横移動量に基づいて、自車両のヨーレートを推定するヨーレート推定部13と、ヨーレートセンサ30により検出されたヨーレート検出値の、ヨーレート推定部13により推定された推定ヨーレート値からのずれを検出するずれ検出部14とを設ける。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
車両用位置検出装置
【課題】車両の走行中において、車両用位置検出装置の消費電力を低減する。
【解決手段】本発明の車両用位置検出装置は、GPS受信装置により受信したGPS信号と自律センサから出力されるセンサ信号とに基づいて車両の位置を検出するように構成されたものにおいて、前記GPS受信装置により受信したGPS信号に基づいて検出した車両位置を用いて前記自律センサの補正を行うセンサ補正手段を備え、前記自律センサの補正を完了したときに、前記GPS受信装置への電源供給を停止し、この電源供給停止後、車両の走行距離が設定距離に達したときに、前記GPS受信装置への電源供給を開始する電源制御手段を備えたものである。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
ナビゲーション信号送信装置および位置情報提供装置
【課題】屋内測位送信機からの測位信号による測位時間の短縮を実現することが可能なナビゲーション信号送信装置および位置情報提供装置を提供する。
【解決手段】情報提供サーバ1230は、携帯電話機1200から送られてくる送信機1210の送信機IDを認識すると、送信機IDに関連付けられているデータベースを参照して、そのIDに関連するSVG地図情報(地図を表示する情報と送信機IDと送信機の当該地図上の位置との対応関係の情報とを含む)を読み出す。情報提供サーバ1230が、SVG地図情報のデータを基地局1240に対して送信すると、基地局1240は、そのSVG地図情報のデータを無線発信する。携帯電話1200は、そのデータの着信を検知すると、携帯電話1200の使用者による閲覧操作に従って、そのデータから、送信機1210の位置を取得することができる。
(もっと読む)
141 - 150 / 275
[ Back to top ]