
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
131 - 140 / 275
歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラム
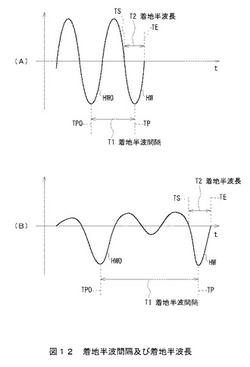
【課題】リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行の状況を精度良く検出できるようにする。
【解決手段】スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
(もっと読む)
衛星測位装置

【課題】より精度良く現在位置を算出する「衛星測位装置」を提供する。
【解決手段】各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す移動ベクトルVd(t)とを求め、移動ベクトルVs(t)と移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。そして、差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。
(もっと読む)
位置推定装置、システム、位置推定方法および位置推定用プログラム
【課題】利用者の興味情報等に基づいてより高い精度の位置情報を提供する。
【解決手段】位置推定装置は、外部から属性を取得して、属性と場所とを対応付けて記憶する記憶手段から、取得した前記属性に対応する場所を取得し、位置を測定する測定手段から取得した測定位置とその誤差範囲とで規定される領域内を所定区域に分割した各区域内に存在する前記記憶手段に記憶されている全ての前記場所の数に対する、前記外部から取得した属性に対応する場所の数の割合の分布を出力する。
(もっと読む)
時間相関データ転送を用いたシステムのための堅牢な誤り許容単信無線データを提供するシステムおよび方法
【課題】時間相関データ転送を用いたシステムのための誤り許容単信無線データを提供するシステムおよび方法を提供する。
【解決手段】システム100は、時間相関データのサンプルを生成するセンサ110と、無線リンク115によってセンサに結合されたノード112とを備える。リンクは、データパケットの単信伝送用の1次ストリームAと、時間相関データの遅延再送を備える遅延データパケットの単信伝送用の2次ストリームA´とを備える。ノードが1次ストリームを介して第1のセンサから第1のデータパケットを受け取る場合、データ受信ノードは有効性をチェックする。第1のデータパケットが破損している場合は、ノードは、2次ストリームを介して受け取られた第2のデータパケットの有効性をチェックする。両方のパケットが破損したデータを含む場合は、ノードは、データパケット内からの破損していないデータサンプルに基づいて、再構成された複数の連続した時間相関データサンプルを構築する。
(もっと読む)
車載情報装置,ナビゲーション装置
【課題】車速パルスのパルス抜けが発生している期間中の車両の走行距離を高精度で算出できる車載情報装置を提供する。
【解決手段】車載情報装置1の制御部10は、カメラ23が撮影した車輪21の撮影画像を取得する。制御部10は、取得した撮影画像と記憶部11のテンプレートデータベース111に記憶されている車輪21のテンプレート画像とのパターンマッチングに基づいて車輪21の回転数を取得する。制御部10は、車速センサ22が出力する車速パルスのパルス抜けが発生するときは、取得した車輪21の回転数に所定の係数を乗ずることにより車両2の走行距離を算出することができる。
(もっと読む)
情報処理装置、コンピュータプログラム
【課題】 プローブ情報に含まれる時系列の位置情報から走行リンクを精度良く特定することができる情報処理装置を提供する。
【解決手段】 中央装置1は、路側通信装置2が設置されているリンクL107が含まれない時刻t3の位置における候補リンク群が、候補リンク群A3(リンクL208、L107、L106)と候補リンク群B3(リンクL205、L204)のうちの候補リンク群B3の1つであることから、この候補リンク群B3に含まれるリンクL205、L204を走行リンクとして特定するとともに、これらの走行リンクに、時刻t2の位置における候補リンク群である候補リンク群A2(リンクL105、L104、L103、L102)と候補リンク群B2(リンクL203、L202、L207)のうちの候補リンク群B2だけが繋がるので、この候補リンク群B2に含まれるリンクL203、L202、L207も走行リンクとして特定する。
(もっと読む)
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
ナビゲーション端末、ナビゲーション方法およびナビゲーションプログラム
【課題】案内経路上でGPS測位が困難な場所を通過する際のナビゲーション精度を向上
させることが可能なナビゲーション端末を提供する。
【解決手段】ナビゲーション端末は、サーバから経路案内データを取得する手段と、ナビ
ゲーション端末の現在位置を測位する手段と、ナビゲーション端末を携帯するユーザの歩
数を計測する手段と、測位位置と経路案内データとに基づいて経路案内及び現在位置を出
力するGPSナビモードと、計測した歩数と経路案内データとに基づいて経路案内及び現
在位置を出力する歩数計ナビモードとを有する手段と、経路案内データによる案内経路に
地上区間と地下街区間が含まれる場合に、現在位置が当該地上区間と当該地下街区間との
境界位置から所定距離内に含まれるか否かを判定し、判定結果に基づいてGPSナビモー
ドと歩数計ナビモードとを切り替える手段とを備える。
(もっと読む)
経路案内装置、経路案内方法及び経路案内プログラム
【課題】案内経路上で複数の部分が近接している箇所を通行するときのルートマッチング精度を向上させる。
【解決手段】経路案内装置は、経路探索サーバから経路データを取得する手段と、経路案内装置の現在位置を測位する手段と、測位位置を経路上の所定の位置に補正する手段と、補正位置に基づいて経路案内を行う手段と、測位位置及び/又は補正位置に基づいて経路案内装置の予測速度を計算する手段と、計算した予測速度で経路案内装置が経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する計算手段と、最新補正位置に対応する測位時刻から所定時間経過後に測位された対象測位位置が予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、対象測位位置に対する補正を行わないように補正手段を制御する制御手段と、を有する。
(もっと読む)
131 - 140 / 275
[ Back to top ]