
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
91 - 100 / 275
鉄道車両の位置検出装置および位置検出方法
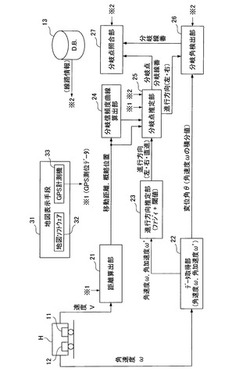
【課題】駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置を提供する。
【解決手段】GPS計測機33により求められた保全車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された保全車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21で算出された移動距離及びGPS計測機33により求められた概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、データ取得部22で求められた変位角θ及び進行方向推定部23で推定された進行方向を入力して分岐角を検出すると共に当該分岐角に対応する分岐線番を出力する分岐角検出部26とを具備したもの。
(もっと読む)
測位装置、測位方法およびプログラム

【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
撮影位置特定システム、撮影位置特定プログラム、及び撮影位置特定方法
【課題】実風景画像の撮影時の気象条件によらず良好に当該実風景画像の撮影位置を特定することが可能な技術を実現する。
【解決手段】参照用データRDを、当該参照用データRDを構成する単位参照データの生成元の風景画像の撮影位置に関連付けて記憶する参照データ記憶部11と、実風景画像SPに基づき生成される実風景データADと参照用データRDとのマッチングを行い、実風景画像SPの撮影位置を特定する撮影位置特定部40と、実風景データADと参照用データRDとのマッチングに際し、実風景画像SPの撮影領域を分割してなる複数の分割領域のそれぞれについて、分割領域の撮影領域中の位置と、現在気象条件情報CWと、過去気象条件情報PWとに基づき、参照用データRDを構成する単位参照データの群の中から各分割領域に対応する単位参照データを選択する単位参照データ選択部42を備える。
(もっと読む)
データ管理システム、データ管理方法、及びデータ管理プログラム
【課題】コストの上昇を抑えつつ十分な量の参照データを整備し、精度の高い位置同定を可能とする技術を実現する。
【解決手段】車両Vからの風景の撮影画像Iを記憶し、当該記憶された撮影画像Iに基づいて画像マッチングのための参照データRを整備するデータ管理システム。退出路Eを有する施設から車両Vが退出したとき、車両Vが実際に走行した実走行退出路を特定する実走行退出路特定部と、退出路進入点から実走行退出路と施設の外の道路との接続地点までの退出区間Fを設定する退出区間設定部と、退出区間F内に、当該退出区間F内で所定の音声案内を完了可能な案内開始地点の設定可能範囲である案内開始区間Gを設定する案内開始区間設定部と、案内開始区間G内で撮影された少なくとも1つの撮影画像Iに基づいて参照データRを生成する参照データ生成部と、を備える。
(もっと読む)
符号化されたマーカーを用いたナビゲーションシステム及び方法
【課題】広範囲に及ぶデータベースや大きな計算資源を必要とせず、容易に実現可能なナビゲーションシステム及び方法へのニーズが存在する。
【解決手段】ナビゲーション環境の中に配置される、符号化されたマーカーを用いた、ナビゲーション環境の中のナビゲータの位置を決定するためのナビゲーションシステム及び方法が開示される。ナビゲーションシステムは:ナビゲーション環境の中の少なくとも一つの符号化されたマーカーの画像を含む場面の画像を取得するよう構成されるカメラ装置と;前記少なくとも一つの符号化されたマーカーを読み取るよう構成されるビデオ分析手段と;前記ビデオ分析手段と接続され、前記少なくとも一つの符号化されたマーカーの既知の場所に基づいてナビゲータの位置を決定するよう構成されるプロセッサと;を有する。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
地図データ生成装置および走行支援装置
【課題】移動物体を含まない3次元地図データを生成できるようにする。
【解決手段】プローブ車両2の走行に伴って収集された、画像データ、測距データおよび測位データを含むプローブデータを地図データ生成装置10の記憶媒体に蓄積記憶させ、この記憶媒体から、同一地点より同一の場所を撮影した撮影画像を含む複数のプローブデータを抽出し、当該同一の場所を撮影した撮影画像の特定画素(X、Y)の画素データの分散値に基づいて、移動物体を含まない撮影画像を特定し、移動物体を含まない撮影画像を含むプローブデータに基づいて移動物体を含まない3次元の地物図データを生成する(S202)。
(もっと読む)
自車両位置特定装置
【課題】 複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる自車両位置特定装置を提供する。
【解決手段】車車間通信ECU1は、車車間通信情報処理部11において、自車両VSの走行開始を判断する。また、車車間情報処理部11は、他車両V1から送信される他車両情報に基づいて他車両の位置を取得する。退出出口推定部14は、他車両の位置に基づいて、自車両VSが退出した出口が、複数の出口のいずれであるかを推定する。
(もっと読む)
車載装置とそのバイアス学習方法
【課題】 従来、車載装置では、ジャイロセンサで検出する回転角度から誤差を除去するために、車両が走行を停止したタイミングでバイアス学習処理を実施する。ここで、車輪が回転していないことで車両が停止していると判定することが多い。しかし、かかる技術では、車輪の回転が停止した状況であっても、車両が移動している状況、例えば回転するターンテーブル上で車両が静止している状況等において、誤ったバイアス学習処理を行ってしまう場合がある。本発明の目的は、正確にバイアス学習処理を行う技術を提供することにある。
【解決手段】
本発明の車載装置は、車両の走行の停止を検知し、車両の走行の停止を検知すると、車両が移動しているか否かを推定し、車両が移動していないと推定した場合に、回転検出装置のバイアス学習を行う。
(もっと読む)
ナビゲーション装置
【課題】GPS受信機に間欠的に電力を供給して定期的に測位をしなくても、ナビゲーション装置を起動した際にすぐに現在位置を表示すると共に経路探索を行うことができるナビゲーション装置を提供する。
【解決手段】本発明のナビゲーション装置は、任意の目的地を設定し目的まで経路案内することができるナビゲーション装置であって、現在位置を検出する現在位置検出手段と、ナビゲーション装置が起動された起動履歴を記憶する記憶手段と、記憶手段に保存された起動履歴から次にナビゲーション装置が起動する条件を予測する起動予測手段と、前記起動予測手段で予測された結果に基づいて前記現在位置検出手段の動作を制御する動作制御手段と、を備えたことを特徴とする。
(もっと読む)
91 - 100 / 275
[ Back to top ]