
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
201 - 210 / 275
移動体の旋回角度・方位・位置を検出するシステムおよび方法
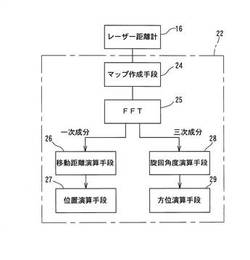
【課題】 移動体の旋回角度および方位を検出するシステムを提供する。
【解決手段】
移動体には、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計が搭載されている。検出システムは、フーリエ変換手段25と、旋回角度演算手段28と、方位演算手段29を備えている。フーリエ変換手段25は、上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換する。旋回角度演算手段28は、移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分例えば三次成分と、上記第2の方位での上記フーリエ変換データの三次成分の位相差に基づき、移動体の旋回角度を演算する。方位演算手段29は、検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する。
(もっと読む)
移動体位置検出装置

【課題】位置情報精度を高めることができると共に、常時、その高い位置情報精度を維持できる移動体位置検出装置を提供する。
【解決手段】レーザレーダ3の検出データに基づく周辺物の複数の節点sと、地図データ上の当該周辺物の複数の節点mとを対応付け、その対応付けられた各組の節点s、mを用いて、座標変換式に基づき誤差θ、qx、qyを算出し、その誤差θ、qx、qyに基づきGPSにより検出された自車1位置を補正する。これにより、ありふれて存在する周辺物に関する複数の節点に基づき誤差算出を可能とし、誤差算出精度を高めると共に、位置補正頻度を高める。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車載用ジャイロのオフセット補正装置
【課題】車両が走行中であってもピッチレートジャイロのオフセットを補正できる車載用ジャイロのオフセット補正装置を提供する。
【解決手段】オフセット補正手段104が、ピッチレートジャイロ101により検出された回転角から求めた角速度のうちヨーレートジャイロ102が検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロ101のオフセット値として補正を行うものである。
(もっと読む)
移動端末、処理装置及びプログラム
【課題】現在位置の取得精度を維持しつつ、省電力化を図る。
【解決手段】絶対位置取得部30が、歩き始めの地点、歩き始めの地点から一定距離L1だけ離れた地点、及び一定距離L2だけ離れた地点で端末本体10の絶対位置を取得し、現在位置取得部36が、当該絶対位置を用いて歩行経路補正部35により補正された歩行経路に基づいて、端末本体の現在位置を取得する。この場合、一定距離L1は、端末本体が移動する2点間の実際の方位と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の方位との最大角度差が、所定範囲内となる2点間の距離であり、一定距離2は、端末本体が移動する2点間の実際の距離と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の距離との最大距離差の実際の距離に対する割合が、所定範囲内となる2点間の距離とされている。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】航法の最初から慣性計測装置のデータを高い精度で補正して高い精度で位置を標定できるようにすることを目的とする。
【解決手段】自己位置標定装置100は航法処理を2回行う。1、2回目の航法処理において、IMU処理部140はカルマンフィルタ150により算出されるIMU誤差推定値に基づいて慣性データを補正し、補正した慣性データに基づいて慣性航法により位置、姿勢および速度を算出する。カルマンフィルタ150はGPS処理部120またはODO処理部130により算出される残差に基づいてIMU誤差推定値を算出する。2回目の航法処理において、IMU処理部140は1回目の航法処理においてカルマンフィルタ150により算出されたIMU誤差推定値をIMU誤差推定値の初期値として用いる。IMU処理部140は2回目の航法処理で算出した位置、姿勢および速度を航法結果として出力する。
(もっと読む)
磁気データ処理装置、方法及びプログラムならびに磁気測定装置
【課題】蓄積された磁気データ群からオフセットを正確に導出できる磁気データ処理装置、方法及びプログラム、並びに磁気測定装置を提供する。
【解決手段】磁気センサから出力される磁気データqiを順次入力する入力手段(92)と、前記磁気データのオフセットを導出するために複数の前記磁気データを母集団データ群として蓄える蓄積手段(92)と、前記母集団データ群を構成する前記複数の磁気データのそれぞれを重み付けしたデータ群を母集団とする統計的手法により前記オフセットを導出する導出手段(94)と、を備える磁気データ処理装置。
(もっと読む)
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
(もっと読む)
移動方法特定装置、方法およびプログラム
【課題】地図情報を参照することなく移動方法を特定することが可能な技術を提供する。
【解決手段】移動方法特定装置であって、位置検出部の移動軌跡を取得する移動軌跡取得手段と、前記移動軌跡の形状を示す指標量を取得する指標量取得手段と、移動方法に対応付けられた前記指標量の範囲を取得する範囲取得手段と、少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定するための条件とする移動方法特定手段と、を備える。
(もっと読む)
位置推定方法および位置推定システム
【課題】送信手段が1つしかない環境でも、受信手段の位置を高い確率で推定することができる位置推定方法および位置推定システムを提供する。
【解決手段】送信手段から無線で送られてきた信号を受信した受信手段が、複数ある候補位置のいずれに位置しているのかを推定する位置推定方法であって、受信手段を各候補位置に配置して受信信号強度分布を取得するステップS1−1と、当該受信信号強度分布を位置指紋として記憶手段に格納するステップS1−2とを実行し、その後、受信手段を推定対象位置に位置させて受信信号強度分布を取得するステップS1−3と、ステップS1−3で取得した受信信号強度分布と、記憶手段に格納されている各候補位置の位置指紋との相関値を求めるステップS1−4と、相関値に基づいて各候補位置の中から推定対象位置に最も相関する候補位置を特定するステップS1−5とを実行する。
(もっと読む)
201 - 210 / 275
[ Back to top ]