
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
181 - 190 / 1,603
クロマティック共焦点ポイントセンサ光学ペン
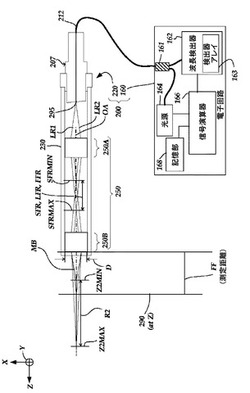
【課題】対象表面までの距離測定用で改善された範囲対分解能比を持った小型のクロマティック共焦点ポイントセンサ光学ペンを提供すること。
【解決手段】光学ペン220は測定範囲対分解能比を拡張する多段の光学的構造を含み、該光学的構造は少なくとも第一および最後の軸方向分散合焦要素250A,250Bを含む。軸方向合焦要素は光学的に結合して光学ペン全体での軸方向色分散量の増加に貢献する。第一の軸方向分散合焦要素は光源放射光を受けてこれを多段の光学的構造内の第一の焦点領域に合焦する。最後の軸方向分散合焦要素は多段の光学的構造内の最後の焦点領域から放射光を受けて測定ビームMBを出力する。中間の焦点領域を形成する中間合焦要素を設けてもよい。このような光学的構造によって今までにない拡張された測定範囲R2、小さいレンズ径、および高い開口数を結合した光学ペンを提供できる。
(もっと読む)
光学的情報読取装置

【課題】測距処理の高速化を図り、確実に測距を行うことができる光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1Aは、光の照射領域102aと非照射領域103aが組み合わせられた測距パターン101aを読取対象物に形成する測距光Saを出射する測距光出射部2を備え、読取対象物に形成された測距パターン101aを固体撮像素子3で撮像して測距パターン101aの画像を取得し、画像信号で信号が落ち込む部分を検出して、測距パターン101aの非照射領域103aの座標に基づき測距を行う。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
画像処理装置、方法、プログラムおよび記録媒体
【課題】測距精度に影響する視差方向のパラメータのキャリブレーション精度を高め、ステレオカメラの測距精度を向上させる画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、ステレオカメラが撮影した撮影画像対を取得し、変換情報を使用して撮影画像対を平行化して、その対応点を探索する。そして、当該対応点を使用して撮影画像対の視差値を算出し、変換情報の較正が必要と判断した場合に、ステレオカメラを構成するカメラの回転ずれを考慮した変換情報に較正する。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
ステレオカメラ校正方法及び装置
【課題】複数の単眼カメラを備え、各単眼カメラから撮像された画像の視差から物体の距離を測定するステレオカメラにおいて、ステレオカメラから校正用ターゲットまでの距離を正確に測定できるようにして、ステレオカメラの校正精度を向上せしめる。
【解決手段】2つの単眼カメラ1,2と、該単眼カメラを連結するカメラステイ3でステレオカメラを構成する。該ステレオカメラの前方に校正用ターゲット30を、後方にレーザ距離計20を設置し、カメラステイの、算出距離方向と垂直に交わる面を基準面として、レーザ距離計により、基準面までの距離L1,及び校正用ターゲットまでの距離L2を測定する。そして、基準面が、算出する距離の原点と既知の位置関係にあることを利用して、測定した距離L1,L2から、ステレオカメラから校正用ターゲットまでの距離を正確に求めて、ステレオカメラのパラメータを校正する。
(もっと読む)
測距装置と方法とプログラム並びに撮像装置と方法とプログラム
【課題】 AF処理が不要な状態が検知されたときに、測距装置の動作に用いる複数の電源のうち、特定の電源供給を停止して電力消費を低減する測距装置および同装置を備える撮像装置に関する。
【解決手段】 被写体からの入射光を結像する第1測距レンズおよび第2測距レンズで結像される被写体像に応じた第1測距信号を出力する第1測距素子と第2測距素子を備え、第1測距信号と第2測距信号とに基づいて被写体までの距離を特定する主制御装置と通知可能で、第1測距信号と第2測距信号とを主制御装置のインターフェース用に変換する画像変換部と、画像変換部に供給される電力を制御する電源制御部と、を有し、電源制御部は通常モードから省電力モードに移行するときに、画像変換部への電力供給を停止する、測距装置による。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
車両用画像認識装置
【課題】測距対象までの距離を単眼カメラによる撮像画像からでも精度良く算出できる、車両用画像認識装置を提供すること。
【解決手段】単眼カメラ11と、単眼カメラ11による撮像画像から道路標示の所定部位を抽出する道路標示抽出部12と、前記所定部位の前記撮像画像上の左右方向の長さを検出する大きさ検出部13と、前記所定部位の実際の左右方向の長さと大きさ検出部13により検出された前記撮像画像上の左右方向の長さと単眼カメラ11の角度分解能とを用いて、前記道路標示までの距離を算出する距離算出部14とを備える、車両用画像認識装置。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
181 - 190 / 1,603
[ Back to top ]