
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
151 - 160 / 1,603
光波距離計
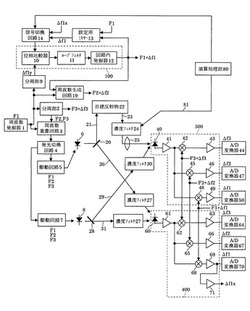
【課題】電気部品等の温度位相ドリフトや受光部(電気回路)を異にすることで生じる原因不明な位相ドリフトによる測距値誤差を大幅に低減した光波距離計を提供する。
【解決手段】2つの発光素子6,8と、2つの受光素子40,60と受光素子40に接続された第1の受光部300と受光素子60に接続された第2の受光部400と発光素子6,8の発光を切り換える発光切換手段4と第2の受光部400を経た信号を帰還して安定状態で再出力するPLL制御回路100と、を備える。発光素子6,8を択一発光させ、発光素子6,8,受光素子40,60等の温度位相ドリフト及び受光部300,400(電気回路)が異なることによる位相ドリフトを含む信号を故意にPLL制御回路100の整調用信号として用い周波数変換器48,68に入力することで、測距信号と参照信号の位相差をとると、既知の固定位相ドリフトのみが残り、原因不明な位相ドリフトは除去される。
(もっと読む)
カメラシミュレーション装置、カメラシミュレーション方法、及びカメラシミュレーションプログラム

【課題】効率的にカメラパラメータのキャリブレーションを行う。
【解決手段】カメラシミュレーション装置において、レンズシステムを模擬した模擬カメラ系で撮像した画像を取得する模擬カメラ系画像取得手段と、前記レンズシステムの設計値での焦点距離を用いたピンホールカメラ系で撮像した画像を取得するピンホールカメラ系画像取得手段と、模擬カメラ系画像取得手段により得られる第1の画像と、前記ピンホールカメラ系画像取得手段により得られる第2の画像との差分値を出力し、前記ピンホールカメラを用いた三角測距の視差に対して、前記差分値を用いて視差誤差の予測値を出力する視差誤差出力手段とを有することで、上記課題を解決する。
(もっと読む)
画像補正方法及び画像補正装置
【課題】レンズと画像センサから構成されるカメラの特性を用いて高精度の画像補正をできるようにする。
【解決手段】カメラの焦点距離、画像センサの並進量に加えて、画像センサの傾きをパラメータとして画像センサから得られた画像を補正する。レンズアレイと画像センサから構成されるレンズアレイステレオカメラの場合には、各レンズが同じ方向を向いていること、各レンズの歪み特性が同一であること等を拘束条件として、カメラキャリブレーションを行い画像を補正する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
ステレオカメラ装置、視差画像生成方法
【課題】広い視野角と視野内の特定領域では高い測距精度を両立したステレオカメラ装置を提供すること。
【解決手段】二つの撮像手段C0、C1と、画像データを等距離射影画像に投影する二つの光学系21と、二つの等距離射影画像から第一の変形画像データ及び第二の変形画像データを生成する第一の画像生成手段31,33と、二つの等距離射影画像の所定領域から第三の変形画像データ及び第四の変形画像データを生成する第二の画像生成手段32,34と、第一の変形画像データと第二の変形画像データから第一の視差画像を生成する第一の視差画像生成手段35と、第三の変形画像データと第四の変形画像データから第二の視差画像を生成する第二の視差画像生成手段36と、第一の変形画像データと第三の変形画像データの倍率により定まる第一の視差画像の画素の画素値を、第二の視差画像の画素の画素値で置き換える画像合成手段37と、を有する。
(もっと読む)
ステレオカメラ装置、画像補整方法
【課題】行毎の撮影時刻が異なる撮像素子を利用したステレオカメラにおいて、光軸ずれによる画像の位置ずれだけでなく、動体歪みも補正することが可能なステレオカメラ装置を提供すること。
【解決手段】2つの画像の相関度から被写体との距離情報を検出するステレオカメラ装置100であって、行と列に配列された画素のうち行毎の撮影時刻が異なる撮像素子C0,C1が2つ配置された画像撮影手段200と、2つの撮像素子の相対的な位置ずれ量を検出する位置ずれ検出手段12と、前記位置ずれ検出手段が検出した垂直方向の前記位置ずれ量に応じて、2つの前記撮像素子の一方の撮影開始時刻を変更する開始時刻変更手段13と、2つの前記撮像素子が撮影した2つの画像の一方を、垂直方向の前記位置ずれ量と同程度、垂直方向に平行移動させる補正手段11と、を有することを特徴とする。
(もっと読む)
動体判別機能付き電子機器
【課題】測定対象物が動体であるか否かを正確に判別することができるコンパクトな動体判別機能付き電子機器を提供する。
【解決手段】動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
画像処理装置および方法、ならびに移動体衝突防止装置
【課題】近距離範囲で物体を正確に認識できる画像処理装置および方法、ならびに移動体衝突防止装置を提供。
【解決手段】画像処理装置は、撮像部、および撮像部が撮像した画像を処理する画像処理部を備え、撮像部は、撮像レンズ、撮像レンズを駆動しフォーカシング距離を変更する合焦機構、および撮像素子を有する。合焦機構は、撮像レンズを駆動して撮像レンズの光軸方向における異なる位置の物体を撮像素子に鮮明に結像させるように順次フォーカシング距離を変更するフォーカススイープを行う。撮像部は、フォーカススイープにおいて複数の異なるフォーカシング距離に応じてそれぞれの画像を撮像する。画像処理部は、この撮像された複数枚の画像から、各画像において鮮明に結像された物体を認識し、それぞれの画像の撮像時のフォーカシング距離に対応してこの認識された物体の位置を表示する物体分布画像を生成する。
(もっと読む)
共焦点変位センサ
【課題】より簡単かつ安価に振動部を作製することが可能な共焦点変位センサを得る。
【解決手段】共焦点変位センサにおける振動部40は、固定体46と、一端41A側の側面41Sが固定体46に固着され、他端41B側に設けられた第1レンズ31を光軸に沿うように往復移動させる第1振動子41と、一端42A側の側面42Sが固定体46に固着される第2振動子42と、を含み、固定体46、第1振動子41、および第2振動子42は、平板状の部材からそれぞれ形成される。
(もっと読む)
測距装置及び撮像装置
【課題】一対の測距用レンズが基線長方向に対して直交方向にずれが生じた場合に、誤差の大きい測距データを出力することがないようにすることができる測距装置及び撮像装置を提供する。
【解決手段】一方の基準ブロックS1内の基準像に対して他方の比較ブロックS2内の相関性の高い比較像を探索する際に、基線長に対して垂直方向に所定位置だけずらして基線長と同じ方向で探索を行い、この検索により算出された撮像データ内における基準像と比較像との間の相対位置差(マッチング値の最小値)が所定値より小さいか否かを判定し、この相対位置差が所定値より小さいと判定した場合には算出した相対位置差を測距演算に使用し、この相対位置差が所定値より大きいと判定した場合には算出した相対位置差を測距演算に使用しないようにする。
(もっと読む)
151 - 160 / 1,603
[ Back to top ]