
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
121 - 130 / 1,603
人体検知センサ及び自動水栓
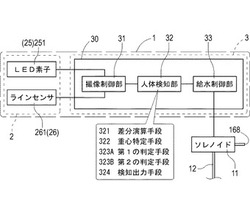
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
変位センサ

【課題】駆動装置を用いることなく、小型であっても、高精度で計測対象物の変位を測定することができる変位センサを提供する。
【解決手段】光源部を有する投光部と、光源部が出射する光を、計測対象物へ向けて集光して照射する照射部と、計測対象物で照射されて反射された光を集光して受光する第1受光部とを具備する光学系を備える変位センサであって、投光部は、光源部と、第1レンズと、第1ハーフミラーとを具備し、照射部は、第1ハーフミラーと、第2レンズとを具備し、第1受光部は、第1ハーフミラーと、少なくとも4つの穴を有し、この4つの穴はそれぞれxy軸上に配置されているスリット板と、第3レンズと、第1受光素子とを具備し、照射部及び第1受光部は、照射部の光軸と第1受光部の光軸とが一致するように配置され、投光部は、該投光部の光軸が照射部及び前記第1受光部の光軸と垂直に交わるように第1ハーフミラーを介して配置する。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
変位検出装置
【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、第1光源モジュール126および第2光源モジュール127によって、検出光L2の放射角度範囲において強度が変化する光強度分布を形成した際の受光部13の受光強度に基づいて対象物体ObのXY座標を検出する。第1光源モジュール126および第2光源モジュール127は、Z軸方向で離間しており、検出光L2の放射角度範囲において強度が一定の光強度分布を形成した際の受光部13の受光強度に基づいてZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
121 - 130 / 1,603
[ Back to top ]