
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
91 - 100 / 1,603
光波距離測定方法及び光波距離装置
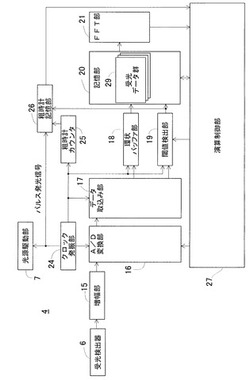
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
検知距離設定装置及びこの検知距離設定装置を備えた自動水栓装置

【課題】判定距離が非常に短い値となって、使い勝手が悪化してしまうことを防止できる検知設定部及びこの検知距離設定装置を備えた自動水栓装置を提供する。
【解決手段】自動水栓装置1はスパウト4とカバー17と検知距離設定装置6とを備えている。スパウト4の先端部4bには吐水口8と検知センサ9が設けられている。カバー17は吐水口8に係止し検知センサ9を覆ってスパウト4の先端部4bに取り付けられる。検知距離設定装置6はスパウト4の先端部4bに検知物が近付いたか否かを検出する検知センサ9と制御装置を備えている。制御装置は赤外線発光素子に鉢の底面に向かって発光させて位置検出素子からの値と予め定められた設定動作開始距離に応じた設定動作開始値とを比較して検知物が設定動作開始距離外に位置していると判定すると判定値の設定を開始する。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
91 - 100 / 1,603
[ Back to top ]