
国際特許分類[G01D3/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | このグループのサブグループに関する特定目的のための手段を有する測定装置 (216)
国際特許分類[G01D3/00]の下位に属する分類
変換機能を改変しまたは修正するもの (54)
望ましくない影響,例.温度,圧力,を軽減するもの (122)
零位法によって作動するもの
装置の安全保護のためのもの,例.異常操作,破損に対するもの (2)
付加的,補助的な指示器または記録器をスイッチングするもの (1)
国際特許分類[G01D3/00]に分類される特許
11 - 20 / 37
センサ装置
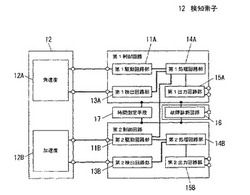
【課題】本発明は、センサ装置の信頼性を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、時間情報を測定し、前記被故障診断部に前記時間情報を伝達する時間測定手段17を設け、前記被故障診断部が前記時間情報をその出力に付加することにより前記故障検知信号と前記センス信号とを前記時間情報により対応付けたものである。この構成により、前記故障検知信号と前記センス信号とを時間的に対応付けることが可能となるため、出力されたセンス信号が正常時のものか故障時のものかを正確に判断することができ、信頼性を向上させることができるのである。
(もっと読む)
補償済センサ出力のための装置及び方法

【課題】迅速な応答と正確な補償とを比較的低コストで提供する。
【解決手段】補償型センサは、センサ(108)と、比較的高速のフィードスルー経路(102)と、比較的低速の補償経路(104)とを含む。比較的高速のフィードスルー経路は、加算増幅器などの加算器(106)及び出力回路(112)を含む。比較的低速の補償経路は、例えば温度依存性や非線形効果など、センサの短所に対する1又は複数の補正ファクタ(C1ーCn)を生じる回路(109)を含む。これらの1又は複数の補正ファクタは、加算器(106)に与えられ、未補償のセンサ出力Sと加算される。更に、出力回路の出力Aは、補償器(110)にフィードバックされ、補償経路(104)において生じる補償済のセンサ出力と差分回路(111)で比較され、差分Dもまた加算器(106)に与えられ、1又は複数の補正ファクタ(C1ーCn)及び前記未補償のセンサ出力Sと加算される。
(もっと読む)
ディジタルデータ補正プログラムおよびディジタルデータ補正装置
【課題】ディジタルデータの精度向上と、追従性の向上を達成する。
【解決手段】センサで計測した角速度をA/D変換器によって変換したディジタルデータがリモコンからゲーム機に送信され、ゲーム機のCPUがそのディジタルデータを補正する。つまり、CPUが、順次のディジタルデータをバッファに順次記憶させる。ステップS37で、最新のディジタルデータに対して各ディジタルデータが安定していると定義できる安定範囲(d1-d2)を算出し、ステップS49で、バッファに格納されたディジタルデータのうち、最新のディジタルデータから遡って連続して安定範囲内にあるディジタルデータの平均値を算出し、ステップS49で、その平均値を用いて最新のディジタルデータを修飾して修飾ディジタルデータを出力する。
(もっと読む)
ディジタルデータ補正プログラムおよびディジタルデータ補正装置
【課題】ディジタルデータの精度向上と、追従性の向上を達成する。
【解決手段】センサで計測した角速度をA/D変換器によって変換したディジタルデータがリモコンからゲーム機に送信され、ゲーム機のCPUがそのディジタルデータを補正する。つまりCPUが、順次のディジタルデータをバッファに順次記憶させる。ステップS37で、最新のディジタルデータに対して各ディジタルデータが安定していると定義できる安定範囲(d1-d2)を算出し、ステップS49で、バッファに格納されたディジタルデータのうち、最新のディジタルデータから遡って連続して安定範囲内にあるディジタルデータの平均値を算出し、ステップS49で、その平均値を用いて最新のディジタルデータを修飾して修飾ディジタルデータを出力する。
(もっと読む)
ディジタルデータ補正プログラムおよびディジタルデータ補正装置
【解決手段】センサで計測した角速度をA/D変換器によって変換したディジタルデータがリモコンからゲーム機に送信され、ゲーム機のCPUがそのディジタルデータを補正する。つまり、CPUが、順次のディジタルデータをバッファに順次記憶させる。ステップS37で、最新のディジタルデータに対して各ディジタルデータが安定していると定義できる安定範囲(d1-d2)を算出し、ステップS49で、バッファに格納されたディジタルデータのうち、最新のディジタルデータから遡って連続して安定範囲内にあるディジタルデータの平均値を算出し、ステップS49で、その平均値を用いて最新のディジタルデータを修飾して修飾ディジタルデータを出力する。
【効果】ディジタルデータの精度向上と、追従性の向上が達成できる。
(もっと読む)
センサ装置およびその特性値調整方法
【課題】センサ部のトリミング処理に必要な精度を確保しつつ面積を低減する。
【解決手段】圧力センサなどのセンサチップで、製造工程や組み立て後に必要な特性値のずれを調整するトリミング処理について、レーザトリミング処理と電気トリミング処理を併用する構成を採用する。製造工程でウエハ状態でレーザトリミング処理S2を行い、センサ部の概略的なトリミングを行う。組み立て後に電気トリミング処理S5により、微調整をすることで精度を高めたトリミングを行うことができる。
(もっと読む)
測定表示装置
【課題】測定値の頻繁な表示変化に起因する信頼性の低下と、測定値の表示無変化の継続に起因する信頼性の低下とを共に解消する。
【解決手段】ステップS101で算出した算出高度と現在表示されている表示高度との差が、±3m以内であるか否かを判別する(ステップS102)。この差が±3mを超える場合には、前記ステップS101で算出した高度を表示部11に表示させて表示高度を更新する(ステップS103)。しかし、今回算出した算出高度と現在表示されている表示高度との差が、±3m以内である場合には、今回の算出高度を記憶する(ステップS104)。算出高度と表示高度との差が5回連続して±3m以内であった場合には、記憶されている5回の計測値(算出高度)に基づき、平均値を算出する(ステップS107)。この算出した平均値を表示させて表示高度を更新する(ステップS103)。
(もっと読む)
信号処理装置、および測定機
【課題】 適切な重み因子に基づくフィルタ処理により、データに適切に追従するフィルタ出力値を得る信号処理装置を提供する。
【解決手段】 ディジタル信号値を経路に沿った複数の区間に分割する。それぞれの区間ごとに、ディジタル信号値とこのディジタル信号値に対するフィルタ出力値との成分ごとの自乗和に基づく離隔量について中間値を算出する。区間内のディジタル信号値について、各区間における中間値に基づいて重み因子を算出するとともに更新する。算出された重み因子を用いたフィルタ演算を実行してディジタル信号値に対するフィルタ出力値を得る。
(もっと読む)
センシング回路、光検出回路、電気光学装置および電子機器
【課題】センシング素子の経時劣化による検出値のずれを簡素な構成で正確に校正する。
【解決手段】光検出回路10は、光センサ回路5の出力値をn×m個取得するたびに、その平均値μを算出する。最初に算出された平均値μは、初期平均値μ0としてメモリ6に保存される。光検出回路10は、2回目以降に平均値μを算出した場合に、今回算出した平均値μとメモリ6に保存されている初期平均値μ0との比から、光センサ回路5に組み込まれているa-Si TFT(光電変換素子)の劣化率Dを算出し、メモリ6に保存している劣化率Dの値を更新する。光検出回路10は、光センサ回路5の出力値とメモリ6に保存されている劣化率Dの値とを用いて、入射する環境光の照度を検出する。
(もっと読む)
零点調整回路及び零点調整方法
【課題】計測機器の零点調整装置及び零点調整方法において、より適切に零点調整を行うことを可能とする。
【解決手段】計測機器の零点調整装置1は、ブリッジ回路10と、その出力端子bに、各々の一方の端子が接続される抵抗素子RC0〜RC3とを備える。CPU40は、抵抗素子RC0〜RC3の各々について、他方の端子の接続状態を3種類の状態の中から一つを選択して切り替える切替手段41を有し、ADC回路22の出力信号に基づいて切替手段41を制御する。具体的には、3進数4桁で記述された管理データを用いる。4桁の各々は抵抗素子RC0〜RC3の各々に対応し、各桁の値は抵抗素子RC0〜RC3の接続状態を3種類の中から一つを指定する。CPU40は、出力信号のレベルが許容範囲にあるか否かを判定し、判定結果に基づいて管理データにおいて処理対象とする桁を順次選択し、選択した桁の値を順次変更する。
(もっと読む)
11 - 20 / 37
[ Back to top ]