
国際特許分類[G01D5/48]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 波または粒子放射による手段を使用するもの (24)
国際特許分類[G01D5/48]の下位に属する分類
放射線源をそなえたもの
国際特許分類[G01D5/48]に分類される特許
1 - 10 / 24
弾性表面波センサ
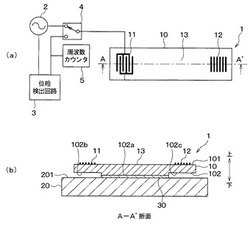
【課題】1つのSAWデバイスによって、歪みと温度の両方を測定できるSAWセンサを提供する。
【解決手段】SAWデバイス1を測定物20の一面201上に配置し、SAWデバイス1の基板下面102のうち伝搬路13の真下に位置する領域102aを測定物20に固定し、基板下面102のうち駆動電極11および反射器12の真下に位置する領域102b、102cを測定物20に固定しない構造とする。この構造では、測定物に歪みが生じると、基板上面の伝搬路13のみに歪みが生じることとなり、反射器12で反射した弾性表面波に位相変化が生じる。このときの位相変化は温度変化の影響をほとんど受けないので、この位相変化から測定物の歪みを測定できる。また、この構造では、SAWデバイス1の共振周波数は、温度変化によって変化し、測定物の歪みの影響を受けないので、共振周波数変化から温度を測定できる。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム

【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出できる位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの偏波面または共振周波数が異なるように移動体が移動する移動路に沿って順に配置される複数種類のRFIDタグのそれぞれに専用のアンテナと、このアンテナの各々を介してRFIDタグに記憶された固有の情報を読み取るタグ読取部と、タグ読取部によりRFIDタグから読み取った固有の情報に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
回転数検出装置、回転検出装置および回転体位置検出装置
【課題】明るい環境下でも簡易な構造で回転の検出を行うことが可能な回転数検出装置、回転検出装置および回転体位置検出装置を提供する。
【解決手段】送信アンテナ2と電波反射面44との間に空間S1が形成され、また、送信アンテナ2と受信アンテナ3との間に空間S2が形成されている。空間S1は、電波反射面44および電波吸収体5で囲まれ、空間S2は電波吸収体5で囲まれている。送信アンテナ2は、距離約λ/4だけ電波反射面44との離間している。電波反射面4で反射した送信アンテナ2の電波(反射波)は、反射に伴って位相が反転し、送信アンテナ2から受信アンテナ3に直接向かう電波(直接波)とは互いに打ち消し合う。これにより、電波が互いに弱め合うヌル点が形成されるヌルポイント状態が発生する。線部材9が空間S2に位置すると、空間S2の電波のレベルが変わり、ヌルポイント状態に影響が及ぶ。
(もっと読む)
可撓性基板を使用する変位感知
【課題】 角度変位を判定するためのセンサを提供する。
【解決手段】
可撓性基板の角度変位が、可撓性基板に関連付けられたミリ波回路の電気的変化に基づいて判定される。この電気的変化は、例えば、位相偏移、振幅偏移、周波数偏移、またはパルス偏移の1つまたは複数に関係することがある。いくつかの実装形態では、可撓性基板は、複数の層に導体を含むことがあり、それにより、可撓性基板の角度変位が、異なる層の導体間の相対変位を引き起こし、それによりミリ波回路の電気的変化を誘発する。
(もっと読む)
第1の事象と第2の事象との間の時間差を求める方法
【課題】2つの事象間の時間差の測定を高い時間分解能で測定し、時間測定に起因する電磁障害を低減する。
【解決手段】位置測定装置の測定信号評価ユニット(3)を用いて第1の事象(A)と第2の事象(B)との間の時間差(T)を求める方法であって、単一または複数の周期信号(x1(t),x2(t))から位置値が求められ、第1の事象(A)の発生時に第1の位置値(φA)が測定信号評価ユニット(3)により求められ、第1の事象(B)の発生時に第2の位置値(φB)が測定信号評価ユニット(3)により求められ、第1および第2の位置値(φA,φB)により時間差(T)が求められる。
(もっと読む)
位置および/または速度を検出する測定装置
【課題】移動可能な要素の位置および/または速度の検出を高い精度で可能にする。
【解決手段】互いに間隔(l1−l9)をもって配置されたマーキング(2,3,25)を有する実量器(1)と、走査ヘッド(4)とを備え、実量器(1)および走査ヘッド(4)が移動方向(5)に沿って相互に移動可能に配置されている位置(x)および/または速度(v)を検出する測定装置において、走査ヘッド(4)は、移動方向(5)において第1のマーキング(2)に対する走査ヘッドの第1の間隔(a1)および移動方向(5)において第2のマーキング(3)に対する走査ヘッドの第2の間隔(a2)を検出可能であり、測定装置が第1の間隔(a1)および第2の間隔(a2)により位置(x)および/または速度(v)を検出する。
(もっと読む)
切替電力供給ノイズの抑制を伴う磁歪変位変換器
変換器116は、磁歪要素102上の繰り返しパルス120を感知し、変換器出力バースト122を提供する。変換器回路126は、変換器出力バーストを検出する。エネルギー貯蔵デバイス130は、変換器回路の電力入力128に結合する。切替電力供給132は、エネルギー貯蔵デバイスに結合し、その間に切替電力供給の切替が抑制される繰り返し抑制状態を有する。シーケンス回路140は、変換器出力バーストとの切替電力供給の繰り返し抑制状態の同期化を提供する。 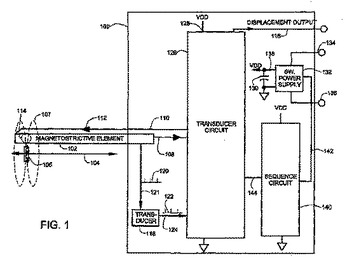 (もっと読む)
(もっと読む)
位相シフトしたバイアスバーストを伴う磁歪変位変換器
アセンブリ100は、変換器出力122を提供する磁歪変換器116を含む。増幅器回路124は、変換器出力を受信し、変換器出力バースト126およびバイアス出力バースト128を生成する。変換器出力バーストおよびバイアス出力バーストは、時間が重複し、位相差だけ異なる。バーストプロセッサ130は、変換器出力バーストおよびバイアス出力バーストを受信する。バーストプロセッサは、変換器出力バーストおよびバイアス出力バーストが同じ電圧レベルである時間の関数である、変位出力118を提供する。 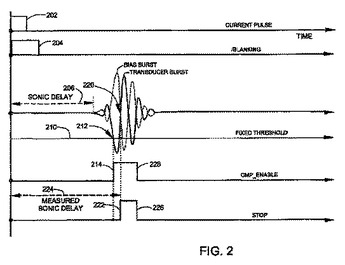 (もっと読む)
(もっと読む)
回転角検出装置
【課題】従来よりも小型、低コスト、高信頼の回転角検出装置を提供する。
【解決手段】車両のステアリングシャフト2の表面近傍で中心軸に対する角度が異なる位置に無線タグ11a、11bを設け、ステアリングシャフト2の外部にアンテナ12を固定的に設ける。信号処理部13は、無線タグ11a、11bから送信され、アンテナ12で受信された受信信号Sa、Sbの強度Xa、Xbを検出し、強度Xa、Xbに基づき無線タグ11a、11bとアンテナ12の間の距離Da、Dbを求め、距離Da、Dbに基づきステアリングシャフト2の回転角θを求める。同様の方法で、任意の回転体の回転角を検出する回転角検出装置を構成することもできる。
(もっと読む)
センシングシステム
【課題】SAWセンサを用いたセンシングシステムにおいて、高速にセンシングすることが可能なセンシングシステムを提供する。
【解決手段】トリガ信号を発生するトリガ信号発生手段と、トリガ信号発生手段により発生されたトリガ信号を含む電気信号を伝送する伝送媒体と、伝送媒体により伝送された電気信号を受信し、受信したトリガ信号を弾性表面波に変換する電極と、弾性表面波を伝搬させ、センシング対象の状態に応じ弾性表面波の伝搬速度及び周波数の少なくとも一方が変化する部材と、伝搬された弾性表面波を電気信号である応答信号に変換する電極とを有し、応答信号を伝送媒体に出力する複数のセンシング手段と、伝送媒体により伝送された応答信号を受信し、トリガ信号、及び受信した応答信号の応答遅延時間を検出することにより、受信した応答信号がいずれのセンシング手段が出力した応答信号かを識別する識別手段と、を有する。
(もっと読む)
1 - 10 / 24
[ Back to top ]