
国際特許分類[G01S13/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353)
国際特許分類[G01S13/00]の下位に属する分類
電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818)
レーダ追跡方式;類似の方式 (328)
電波の再放射を使用する方式,例.二次レーダ方式;類似の方式 (999)
レーダ方式と非レーダ方式,例.ソーナ,方位測定機,との結合 (221)
レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
特定の応用に特に適合したレーダ方式または類似の方式 (1,783)
国際特許分類[G01S13/00]に分類される特許
1 - 2 / 2
移動物体検出装置および自律移動物体
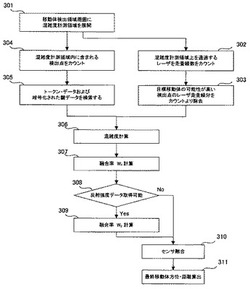
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
複数の情報源を有する監視ポータル
監視システム(20)は、被写体(32)を撮像するためのミリメートル波の電磁放射を用いて、人物(36)と、その人物(36)によって携行されている物体(38)とを含む被写体(32)を検問するように構成されている第1のセンサ装置(26)を含むことができる。補助情報源(30)が、人物(36)によって携行されている可能性のある物体(36)に関係付けることができる被写体(32)に関するさらなる情報を提供する。関係情報が、生成された画像信号(125)と被写体情報とを関係付ける。補助情報源(30)は、被写体位置(34)の人物(36)によって携行されている可能性のある物体(38)の所与の特性を検出するように適合されている第2のセンサ装置(26)とすることができる。次いで、所与の特性を有する物体(38)を人物(36)が携行しているかどうかに関する関係情報を生成することができる。 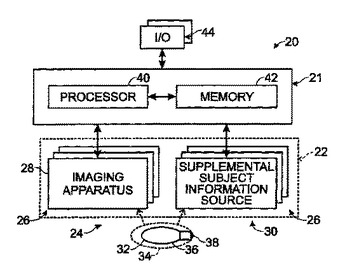 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]