
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
1 - 10 / 202
移動物体監視システム
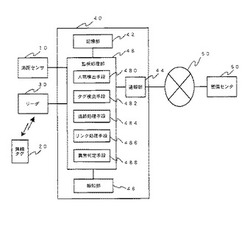
【課題】監視エリアにいる人物と携帯機とを対応付けし、携帯機を持たない不審者を確実に検出する。
【解決手段】移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアに存在する移動物体の位置情報を検出し、また、携帯機が発した無線信号から当該携帯機の位置情報を検出し、位置情報の一致性に基づいて移動物体と携帯機とを対応付けする。このとき、移動物体の位置情報に応じて、一定判定の基準を異ならせる。これにより、監視エリア内のセキュリティレベルが高い場所ほど厳格な基準で移動物体と携帯機との対応付けがなされ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
(もっと読む)
レーダ通信装置

【課題】空中線が回転駆動して他船の船舶に対して、通信データを送信することが可能なレーダ通信装置を提供する。
【解決手段】
レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部14と、通信データの送受信を行う通信送受信部18とを備え、通信データをレーダ波に合成して送受信することにより空中線が回転する他船と通信する装置であって、自船の空中線を回転駆動するモータを制御するモータ制御部52と、他船の真方位θtを取得し、他船の空中線の回転周期Tを算出し、自船の空中線θsが他船の空中線に対して正対するときの時刻である正対時刻tを算出するレーダ制御部12と、を有し、モータ制御部52は、自船の空中線を、レーダ制御部26によって算出された正対時刻tまでに、他船の真方位θtに自船の空中線の真方位θsが一致する位置に待機させ、通信送受信部16は、他船と通信する。
(もっと読む)
レーダ通信装置
【課題】空中線が回転している他船の船舶と、データ通信可能なレーダ通信装置を提供する。
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法
【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
位置特定システム
【課題】航空機から送信された信号の反射信号を利用して航空機の飛行を監視する。
【解決手段】位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
(もっと読む)
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
(もっと読む)
レーダ装置
【課題】航空機から送信された信号の反射信号を利用して航法支援する。
【解決手段】レーダ装置は、受信部と、相関処理部と、演算部とを備える。受信部は、アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する。相関処理部は、受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める。演算部は、受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際のアンテナの回転角度と、相関処理部で求められた遅延時間とを利用して、他の航空機の位置を推定する。
(もっと読む)
レーダ装置
【課題】少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
追尾情報管理装置、追尾情報管理システム及びレーダ装置
【課題】異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供する。
【解決手段】追尾情報管理装置は、受信部と、判断部と、グローバルID付与部と、送信部と、を備える。受信部は、レーダエコーに基づいて目標追尾を行うことで得られたTT情報を複数のレーダ装置から受信する。判断部は、TT情報に含まれる目標エコー同士が物標を示すか否かを判断する。グローバルID付与部は、判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。送信部は、グローバルID付与部が付与したグローバルIDをそれぞれのレーダ装置に送信する。各レーダ装置は、グローバルID付与部から付与されたグローバルIDとともに、目標エコーを表示する。
(もっと読む)
1 - 10 / 202
[ Back to top ]