
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
41 - 50 / 202
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、車両(自車両P)の左前部および右前部に配置されて車両(自車両P)の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。右レーダ11Rは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、右レーダ11Rの検出領域ARの左端と先行車両Qの後部左端QLとが一致するようにして配置されている。また、左レーダ11Lは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、左レーダ11Lの検出領域ALの右端と先行車両Qの後部右端QRとが一致するようにして配置されている。
(もっと読む)
拡張現実のためのブロードバンドパッシブ追跡

それぞれが周囲の放送ソースからの電磁波(たとえば、無線周波数「RF」信号)を感知する能力を有するいくつかのパッシブ受信機を使用することができるブロードバンドパッシブセンシングおよび追跡システムに関する技術が、全般的に説明される。各パッシブ受信機は、1つまたは複数のアンテナによって感知するように構成され得る。異なる位置の複数の受信機が、関心のあるシーンの協調した追跡を行うように構成されたブロードバンドセンシングネットワークを形成するために利用され得る。一部の例によれば、ビームフォーミングアルゴリズムが、物体を測位および追跡するためにパッシブ受信機によって形成されたアンテナアレーを利用するブロードバンドセンシングネットワークに適用され得る。 (もっと読む)
レーダ装置
【課題】受信信号の組合せの問題を解き複数目標それぞれについて高精度な測位、測速処理を実現するレーダ装置を提供する。
【解決手段】電波の放射を行う送信部100と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサTDSおよび各目標の方位を観測するための測角センサASをそれぞれ有する複数の受信部200,300と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部Cと、を備えた。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの左右方向位置差分Δを算出し、この差分Δが所定の閾値Aよりも大きいか否かを判定する左右方向位置判定部23と、反射点rR,rLの左右方向位置差分Δの時間微分絶対値βが所定の閾値Bよりも大きいか否かを判定する時間微分絶対値判定部24と、反射点間距離の変化に基づいて前方領域を横切る物体が存在することを検知する物体検知部25とを備える。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの間の反射点間距離と、自車両の前後方向における各反射点rR,rLまでの距離を算出し、反射点間距離と各反射点rR,rLまでの距離とに基づいて物体の幅を検知する物体検知部26を備える。
(もっと読む)
目標追尾装置
【課題】必要最小限のセンサ使用回数を効率的に決定することができる目標追尾装置を提供する。
【解決手段】目標追尾装置10は、追尾処理部2と、レーダ制御要否判定部3と、レーダ使用回数決定部4と、レーダ指示部5とを有している。追尾処理部2は、レーダ群1から得られた観測値を用いて目標の運動諸元を算出して、その算出した運動諸元から、目標航跡を導出するとともに、目標航跡の誤差共分散行列を算出する。レーダ制御要否判定部3は、目標航跡の誤差共分散行列に基づく目標航跡の推定精度と要求精度とを用いて、レーダ制御を実施するか否かを判定する。レーダ使用回数決定部4は、目標航跡の誤差共分散行列と、センサ毎の観測精度及び要求精度とを用いて、第1及び第2レーダ1a,1bのそれぞれについてのセンサ使用回数を制約付き最適化問題から導出する。
(もっと読む)
画像処理装置及び監視システム及び画像処理方法及び画像処理プログラム
【課題】合成開口レーダの観測信号を迅速に画像化する。
【解決手段】画像処理装置200は、例えば地上局110a等、地上の1つの地点や、例えば海上保安船110b等、海上を移動する船舶に搭載される。それぞれの画像処理装置200にて、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
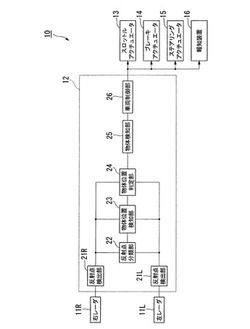
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
合成開口レーダ装置
【課題】 航空機や衛星等の移動プラットフォームに送信アンテナを搭載し、地上に受信アンテナを設置し、GPS受信機で受信したGPS信号を用いて、送信アンテナと受信アンテナの時刻同期を行うバイスタティック合成開口レーダ装置において、GPS信号の精度が劣化した場合にも、ぼけのない合成開口レーダ画像を得る。
【解決手段】 送信側レーダとは異なる位置に設けられて離間配置された第1、第2の受信用アンテナを設け、第1、第2の受信用アンテナから受信した高周波パルス信号の位相差の観測値から、送信側レーダの時刻同期用信号と受信側レーダの時刻同期用信号の時刻同期誤差を求め、求めた時刻誤差によって第1、第2の受信用アンテナからの高周波パルス信号の位相補正を行い、合成開口処理を行う。
(もっと読む)
低電力空間結合フェーズドアレイレーダー
【課題】低電力空間結合フェーズドアレイレーダーを提供する。
【解決手段】レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができるようにする複数の小型レーダーである。レーダーシステムは、クロックと、クロックと通信する複数の周波数変調/持続波(FM/CW)又はパルス圧縮レーダーユニットと、複数のFM/CWレーダーユニットと通信するプロセッサとを備える。複数のFM/CWレーダーユニットはそれぞれ一列のアンテナ素子を含む。
(もっと読む)
41 - 50 / 202
[ Back to top ]