
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
71 - 80 / 202
センサ制御装置
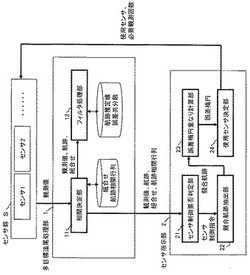
【課題】複数の近接目標の追尾における相関性能を向上するためのセンサ制御を行う。
【解決手段】複数センサから得られる観測値を追尾処理し目標航跡を生成する際使用センサを決定するセンサ制御装置であって、複数の相関仮説を生成しながら目標航跡と観測値の相関を決定する相関決定部11、対応付けられた観測値を用い各航跡の運動諸元を計算するフィルタ処理部12、相関決定状況からセンサ制御を実施するべきか否か判定するセンサ制御要否判定部21、センサ制御を実施するべきと判定された場合に相関決定部が生成した航跡相関行列から競合を解消すべき航跡群を抽出する競合航跡抽出部22、競合を解消すべき航跡群の誤差共分散行列よりセンサの観測方向の誤差を算出する誤差楕円重なり計算部23、算出されるセンサの観測方向の誤差に基づいてセンサの観測方向の重なりを解消するセンサの選択とセンサ使用回数の決定を行う使用センサ決定部24を備える。
(もっと読む)
軸調整用ターゲット装置

【課題】車両に搭載されたレーダと撮像手段の軸調整用のターゲットを共有化する。
【解決手段】電波を送信するとともに物体により反射された反射波を受信することにより物体の位置を検知するレーダと、前記レーダの検知方向と同じ方向の画像を撮像するカメラと、を備える車載用物体検知装置に用いられる軸調整用ターゲット装置10であり、複数の起伏を等間隔に配置した電波吸収体14と、電波吸収体14の前面に設けられ表面19が略平坦に形成された電波透過体17と、電波吸収体14の前面に設けられた電波反射体20およびカメラ用のターゲット25と、を備える。
(もっと読む)
障害物検出装置
【課題】他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供する。
【解決手段】方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行う。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
降雨レーダ合成処理装置
【課題】精度を高めることができる降雨レーダ合成処理装置を提供する。
【解決手段】降雨レーダ合成処理装置1は、Xバンドレーダ51の測定領域53を複数のセクタ方向と複数のレンジ方向とに分割した各メッシュMEs,rの平均受信電力Prを算出する初期設定部2と、平均受信電力Prに基づいて、減衰補正項を算出する減衰補正項算出部4と、各セクタにおいて、減衰補正項KIRが基準値KIRstよりも大きいメッシュMEs,rのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定するとともに、平均受信電力Prが閾値ThPrよりも小さいメッシュのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定する複合減衰判定処理部7と、減衰開始レンジ番号rstに基づいて、降雨データを合成する合成処理部10とを備えている。
(もっと読む)
状況表示装置
【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
RFIDタグを用いた位置確認システム
本発明は、RFIDタグを利用したU(ユビキタス)−安心サービスであって、従来のRFIDを利用したシステムが空間的な制約を多く受け、一つのアパート団地、テーマパークなどのように、局所的に使われていたことに対して、本発明は、広い認識範囲を有するRFIDリーダを街頭の所々に位置させ、前記RFIDリーダを通じて位置情報を受信しつつ、また、携帯電話に設置されたまた他のRFIDリーダを通じて、RFIDをクリックする回数に応じて、予め保存されたメッセージとともに運営サーバに伝送することによって、使用者が無事であるというメッセージを通じて使用者の保護者を安心させることができ、また、保護者は、使用者の位置情報を運営サーバを通じて随時把握することができ、危急な状況が発生した場合には、社会的セーフティネットに直ちに連結するようにすることで、危急な状況に迅速に対処できるようにするシステムを提供する。 (もっと読む)
レーダシステム、及び移動体
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
位置検出装置、位置検出方法及び位置検出プログラム
【課題】簡単な構成により効率的にRFIDタグの位置を特定することを目的とする。
【解決手段】読取部11は、複数のタグリーダの各タグリーダにより、IDタグからタグ情報を読み出すための読取信号であって所定の形状に広がる読取信号を、出力強度を変えながら前記所定の領域内へ順次放射して、前記IDタグからタグ情報を読み出す。そして、位置検出部12は、読取部11がIDタグからタグ情報を読み出した場合の読取信号の出力強度と、どのタグリーダが前記タグ情報を読み出したかとからIDタグの位置を検出する。
(もっと読む)
レーダ装置
【課題】複数個のレーダの電波干渉を抑えることのできるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ11、12、制御装置9を備え、制御装置9は、レーダ11、12の波形パターンを制御する。信号処理装置23は、制御装置9の指示を受けて、波形メモリ24からFM−CWモード3、CWモード4のVCO25の周波数変調パターンを選択してモード切換230を行い、送信アンテナ21から電波を出力する。そのとき、レーダ11、12で出力する連続波の信号の周波数が、互いに同じ周波数になる時間が連続しないよう、制御装置9は、それぞれの上記レーダの周波数変調パターンまたは当該パターンの出力タイミングを信号処理装置23に指示する。
(もっと読む)
71 - 80 / 202
[ Back to top ]